しばらく前にFaceBookには投稿していたのだけれど、改めてブログに。
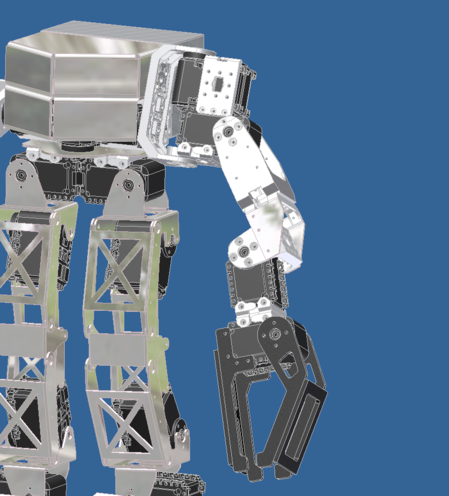
KO-LInkの肩の軸を再検討中。
逆運動学のためには最低2軸直交していれば、位置の制御的にはOKなのだけど、手の制御の場合、脚の制御以上に”機能”もしくは”見た目”の問題で3軸直交にした方が、よりベターである。
一番多く見受けられるのは、体幹からヨー、ロール、ヨーの順番で3軸を直行させる方法。
今のKO-Linkもこの形状。
ただ、これは幾何学だと結構計算が煩雑になるので、今のところ制御の中に逆運動学は取り入れていない。
(当然、ヤコビアン使えば間違いなく解けますが)
もっと簡単な計算のために、計算のための設計を行うとどうなるかなーってことでいろいろ案を書き出してみた。
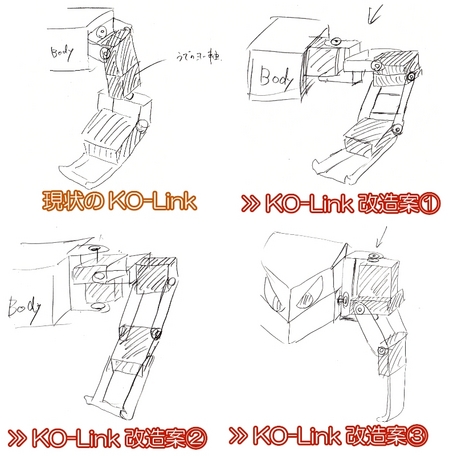
案3を書いたところでふと気が付く。
これって脚の3軸直交と同じじゃん!?
脚と同じなら計算も脚のものをベースに流用すればOKのはず。
というわけで、今後KO-Linkはこうなっていくだろう…。の図。