船場ロボットファッションコンテストへむけてKUMACOを大改修中。
重量が増えても、ちゃんと舞台で歩けるように、とうとう膝軸を追加することにしました。
Meros、KUMACO、と、いろいろ膝なしロボットを作ってきましたが、ちょっと限界を感じました。
拘束された中でのぎこちない動きというのも可愛いのですけどね。
というわけで、今のところの予定の設計がコレ
上半身はとりあえず変わってません。
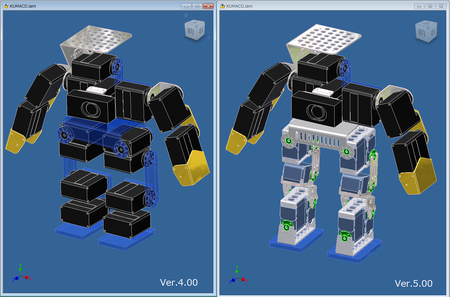
Ver.1の時と比べると、えらい変わりようですw


船場ロボットファッションコンテストへむけてKUMACOを大改修中。
重量が増えても、ちゃんと舞台で歩けるように、とうとう膝軸を追加することにしました。
Meros、KUMACO、と、いろいろ膝なしロボットを作ってきましたが、ちょっと限界を感じました。
拘束された中でのぎこちない動きというのも可愛いのですけどね。
というわけで、今のところの予定の設計がコレ
上半身はとりあえず変わってません。
Ver.1の時と比べると、えらい変わりようですw









