面白いサーボに出会った。
HPIジャパンの二足歩行ロボットキット「G-ROBOTS」に搭載されているサーボ。
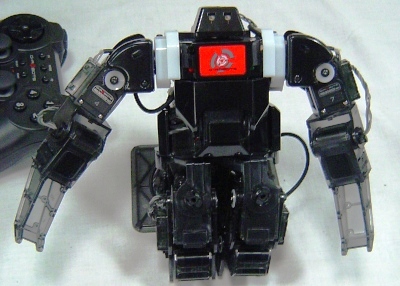
その姉妹品。FUTABAの「RS301CR」

28gという軽さながら、0.11sec/60°で7.1kg・cmらしい。
このスペックだけ聞くと、GWSとかにも似たようなスペックのサーボはあるのだが…
実はコレRS485の半二重通信
A/Dコンバーターは12bit
つまりAX-12みたいなヤツですね。
でもAX-12は10bitなんで、4倍も精度があるらしいです。
そして販売しているスタッフの方がどうもウチのホームページを見てくださったことがあるらしく、シリアル通信サーボを使っている数少ないユーザーとして、是非使って欲しいって言われました。ちょっとびっくりしました。
それで、いろいろお話を聞かせてもらったんですが、保持力の強さと、安全性はピカイチだそうです。
「FETが焼けるようなことはありえない!」
「静電気のテストも綿密に行っていてAX-12のようにファームが消えるようなこともありえない」
あまりにも自信を持って勧められるんで驚きました。
ちょっとコレは試してみる価値ありそうですね。
FUTABAといえば、貫通軸のロボット用サーボ「RS601CR」も興味あったんですが、こういう高性能の小型モーターもすごく興味あます。
実はまだ単体売りはされていないようなので発売されたらとりあえず、1個注文してみようかと思います。
今回KUMACOに久々にPWMサーボを使ったんですが、やっぱりデジタルサーボをわざわざパルスにするPWM方式は時間軸においてアナログなのでロスが多いし、効率は悪いと思います。
まぁ、資格審査直前でマイコン焼いた自分がPWMうんぬんを語るのはいかがなものですが。
あと、西村ボスの製作したロボット。
赤色の長身80cmには驚きました。
ゼロスピンドルのVAIO TYPE-U積んでましたね。
昔、TYPE-Uをロボットに積みたいって言った事があったんですが、まさに先を越されましたw
音声合成もしっかりやってましたね。
やっぱり、いつかやってみたい。
>> 歩く VAIO type U
300gくらいのキーボードなしのノートも最近出てるんでとくにTYPE-Uにこだわってはいないんですが、Windows搭載のノートをロボットに乗せて、画像解析・音声解析・音声合成・姿勢制御やらせてみたいです。
そのためにもいちいちサーボコントローラーを組まなければならないPWMではなくてシリアルのサーボに頑張ってもらいたいと思います。
そして、今回もいろいろな人とお話できました。
予選にも出れなかったKUMACOを知ってもらいたくてKUMACOを抱いてグルグル回ってたんですがいろんなひとが「なぜヌイグルミ抱いてるの?」って聞かれるんですね。

それで、「実はロボットです」って。
ホントはステージでみんなに見せたかったんですが、それができなかったコトだけは残念でした。
今まで、いろんなロボット作って迷走してたんですが、KUMACOでちょっと方向性が見えてきました。
次は5月を目標にKUMACOの内部を見直そうと思います。
そして、今回、旭さんのおかげでこれまた、いろんな人と知り合えました。
ありがとうございました。
「紹介」の力ってすごいなーと思いながら、とにかく旭さんには感謝です。
今日は、ちょっと遅くなって11時すぎに行ったところ、どうも入れ違いになってしまったようで、挨拶できなかったんで、この場を借りて・・・「お疲れ様でした〜〜☆」
最後に、

ROBO-ONE終わって、秋葉原に行き、マイコン用の空冷ファンを買って、機種変更しました。
地方のauショップで2万のものが9000円になった上にいろいろ割引かかって4500円で出来ました。
秋葉原が近所に欲しい・・・・w
とにかく、ROBO-ONE関係者・参加者のみなさん!
お疲れ様でした!!!















最近のコメント