3年前に一度見学したことがあるレスキューロボットコンテスト。
そのときは大学1年でした。
その直後にロボット研究サークルを立ち上げ、二足歩行からはじめたロボットですが・・・
それから3年、今年大学4年になって、部員もだいぶ集まり、初めてレスキューロボットコンテストに参加しました。
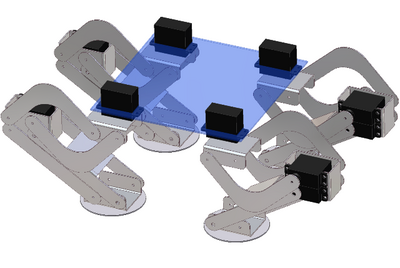
出場したマシンはこちら。

1号機から「エミッタ」「コレクタ」「ベース」の名称。
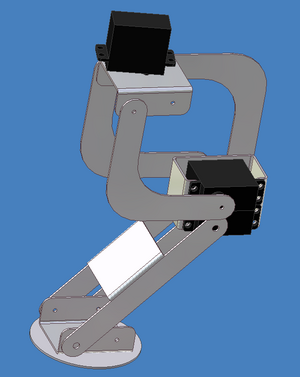
1号機はRX-64サーボを用いてカメラアームを持ち上げ広範囲を映し出します。
2号機はマスタースレーブハンドでダミヤンを救出。
3号機は加速度センサで常に水平に保つベッドでダミヤンを搬送します。
他のチームのマシンに比べてやたらサーボモーターを多用していたと思います。
加速度センサ、マスタースレーブ等、二足歩行で培った技術を多用しました。
通信に関しては他のチームが、受信機から送られてきたパルスを用いてサーボを回し用いてスイッチングというローテクでアナログな方法を使っていた中、うちのチームはオリジナルのプロトコルで自由なパケット長のシリアル通信していたので、プログラムや通信でのアドバンテージは大きかったと思います。
じゃあ、なぜ負けたのか・・・。
それは「メカ」ですね。
初めてROBO-ONEに出たときも感じたのですが・・・。
直前まで「これでいい!」と思ったロボットなのに実際に行ってみると周りのロボットとのあまりの違いに驚きました。
プログラムがどうとか、そういう話の前に、設計の時点で機構的に負けてるんですよね。
僕が在籍している学部の性質でもあるんですが、ソフトウェア寄りでハードはあまり強くないです。
その辺を勉強しなおして来年出直しですね。
とはいえ、僕はもう4年です。
院に行く予定もないのでこれで、最初で最後のレスコンの夏は終わりました。
「メヒャ」として大会への参加はたぶんこれで最後だったでしょう。
ちょっとブルーになったりもしてましたが、これから1,2,3年生に教えられることをなるべくたくさん教えていこうと思います。
さて、レスコンがなくなってこれから1ヶ月の予定がポカンと空いてしまった。
日程がかぶっていて出場をあきらめていたロボゴング。
まだ、登録が1週間あるらしいので、行こうかな、なんて思ってます。
現在製作中のサルボはロッポの規格なんで、ゴングじゃないと出れないしね。
これからはDreamDrive!!として、ますます頑張ります!
PS:
ちなみに100kgf俺サーボですが、出力は問題なかったのですが、ロータリーエンコーダーが自分の振動で自爆してしまい、ロータリー1つにつき3日のペースで壊れてしまうので、結局本番では見せられませんでした。
そうそう、レスコンの会場で三月兎さんにお会いました。
いつもお疲れ様です。m(_ _)m



 攻殻は本当にイイ!!
攻殻は本当にイイ!! 再度、観たくなる作品
再度、観たくなる作品














最近のコメント