
Gロボ無線化にあたってまずBluetoothを考えたのですが、部品ボックスを眺めていると
- ZIG-100B ×2
- ZIG-100B用RS232C変換器 ×1
が、在庫にあったので、
ZIG-100B用RS232C変換器×1、と、USBシリアル変換ケーブル×1を追加購入して、ZigBeeの環境を作りました。
ベステクの"USBシリアル変換ケーブル"は単純なRS232Cの変換ではなく、同時にRS485とTTLの変換も出来てしまう優れもので、Dynamixelシリーズのモーターのパラメーターを直接書き込むことも出来る代物なので、この際思い切って購入しました。
購入するにあたって、この間秋葉原に行ったときにいろいろ店を見て回ったのですが、ベステクの商品を在庫で取り揃えているショップってあんまりないんですよね。
結局、直販で買いました。
ちなみにこのZIgBee、息の長い商品の割にROBO-ONEクラスタではあまり使っている人を見ない気がします。
XBeeが人気なんでしょうか。
今回、ZIG-100B用RS232C変換器を購入した見たら、以前から持っていた変換器と基板のパターンが変わっていました。
右が旧基板で、左が新基板です。
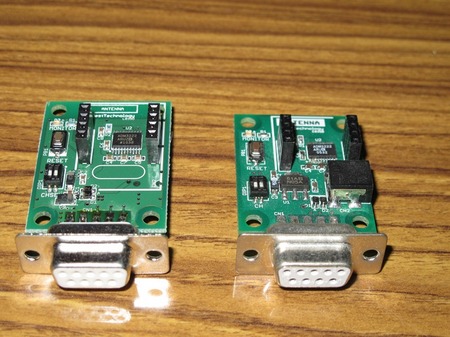

使用部品や使い方は変わっていませんでしたが、レギュレーターとDCジャックの位置が変わっていました。
収まり具合は旧基板の方が好きなのですが、ノイズ対策か何かでしょうか…。理由は分かりません。
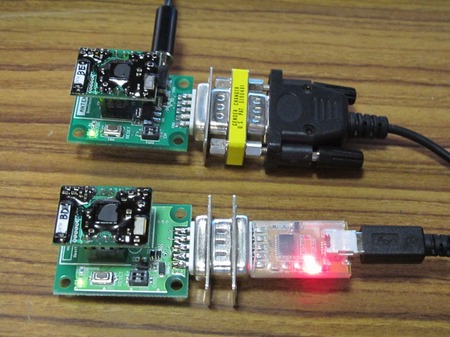
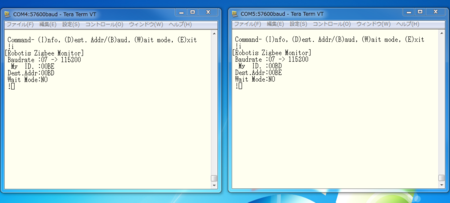
とりあえず、PCに2個繋いだ上で、ターミナルソフトを同時起動してペアリングさせます。
バッチリ、115200bpsでペアリングOKです。
さて、この基板についてくるACアダプタの出力電圧は5Vなのですが、使われているレギュレーターのL1117-3.3のデータシートを見てみると上限が15Vです。電源変換なしでリポ直結OKですね。
(このL1117ってあまり見ないけど、電圧降下1.2Vの電流容量1.2Aで結構面白いレギュレーターですね。)
というわけでこんな感じに改造しました。

シリアル用の9ピンコネクタを取り外して、2.5mmのミニミニピンジャックに変更。
入力電源はGロボのサーボ(RS30x)のコネクタを取り付け、サーボの分配ハブから7.4Vを直接とれるように変更。
胸部に組み込みました。


エクセル運動学もちゃんと動きました。
ただ、良い感じに収まってますが、アルミの胸部で覆ったのは失敗で、電波強度の劣化が激しいので、この後取り外しました。
目立たない取り付け方法に悩み中ですw









