
G-ROBOTSをRPU-10を経由せず直接PCから制御してみよう!
ということで、やってみました。
まずは、RS-485の変換器を製作します。
本来はUSB-RS485変換器(RSC-U485)を購入すれば一発OKな話なのですが、今回は、ベストテクノロジーのUSBシリアル変換ケーブルを利用しました。
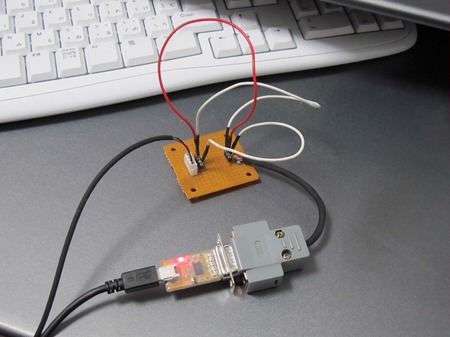
ピンアサインが分からないので、テスト基板を作って、ブレッドボード用のジャンパ線でテスト!
※ちなみにUSBシリアル変換ケーブルの方がちょっと安いのですが、追加部品と手間を考えると断然RSC-U485の方が楽なので、オススメはしません。あくまでも、たまたま手元にケーブルがあったからという事で・・・。(^_^;A
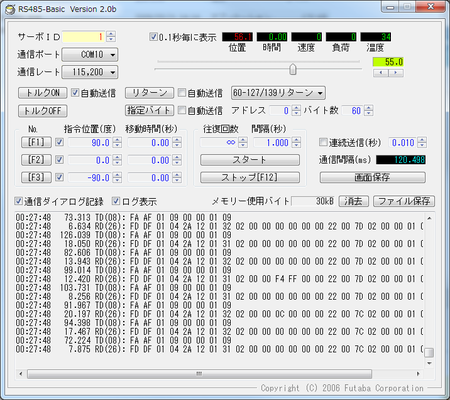
結果は、バッチリ動いています。
双葉さんのHPにあるHSPのサンプルで確認しました。
これでExcel Walkerは次のステップに進みます。
とはいえ、まずは今までのバトルで傷ついたG-ROBOTSを修理するのが先ですね。
腰も肘も砕けて大変な事になっています(笑)









