突然ですが、G-Robotsの制御で、現状のエクセルだけではどうしても膝のサーボがダレてしまい、少し行き詰った感が出てきました。
ただ、RS-30xのサーボ自体まだまだ理解できていると言い難く、パラメーターの最適化もしていないので、まずはここからと思い、既に使いこなされている方と、中の方に直接質問してみました。
まず、V-Sidoの吉崎さんに301,302と303,304について違いをTwitter経由で聞いてみた。(勝手に掲載すみません)
@Dream_Drive 仕様上,コンプライアンス設定の最大値とか,コンプライアンスマージンの初期値が違ったはず.結果として,303,304の方が細かい制御が可能でした.加減速のタイミングもちょっと違うかも.
うーん。
そうか303が良いのか・・・。加減速に違いまであるのか。
その他、あのリターンパケットなどの速さは、そもそもRPU10のファームを自分で書かれてるとの事。…流石ですね。
RPU-10のファームに関しては、以前ベステクのGDLでSISOさんがいろいろ研究されていたので、資料は結構あるのですが、今はまだファームまで手を出す元気がないので、まずはモーターのパラメーターをどうにかしようと思います。
とりあえず、まずは自分なりにメモリのマップをサーボ別に比較してみた。
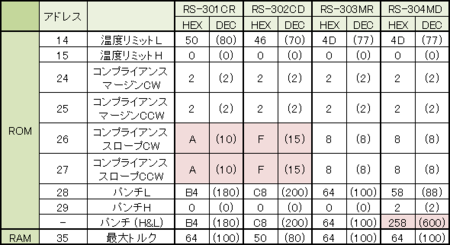
301,302と303,304は発売時期も違うので、それぞれ、特にコンプライアンスに違いがあるように見えますね。
まぁスペックだけ眺めても答えは出ないので、いつもお世話になっている中の方に、なぜこのような初期パラメーターになったのか直接聞いてみました。
Q1.303,304はコンプライアンススロープがどちらも"8"に設定されています。
301,302もより少ない値の方が保持力が大きいように思うのですが301や302も"8"にすると問題点などありますでしょうか?
A1.問題ありません。
初期値は各サーボが無負荷状態で発振しない(ハンチングが発生しない)程度の値に設定されています。
ロボットに組み込まれる等してある程度の負荷がかかっている状態であれば、
その状態に対する適切な値が初期値(工場出荷時の値)より小さくなることもあります。
という事は、実際に負荷がかかる状態で使うには、301,302もコンプライアンススロープの値をたとえば"8"とかに設定しちゃった方が良い動きをする”かもしれない”ということですね。
Q2.RS-302の温度リミットがRS-304より低いのは何か理由があるのでしょうか?
A2.使用される基板(回路)が異なるため、それぞれに適した値が設定されています。
なるほど、TTLやPWMの仕様の違いもあるし、回路も違うのですね。
Q3.RS-301,302は303に比べてパンチの値が2倍くらい大きいようですが、301は細かい制御が難しいのでしょうか?逆に304はかなり大きい値になっています。
(説明には”適切な値”とありますが、この値はあまり触らない方がよいですかね?)
A3.初期値はコンプライアンススロープと同じく「無負荷状態で発振しない値」ですので、
使用環境に応じて上げても(発振しなければ)問題ありません。
それぞれサーボごとに値があまりにも違うので戸惑っていたのですが、これも最適化の対象にした方が良さそう。
Q4.これは内部パラメータには関係ないのですが、303,304版のGロボは301,302のサーボコネクタと同じでしょうか。
303版のGロボのPDFには4ピンで1ピンはダミーと書いてあったので、301と同じ4ピンコネクタかなと思っていたのですが、JO-ZEROの303,304がラジコン用の3ピンコネクタだったので、ディアゴスティーニの306も同じですよね。
サーボ単品で303,304を買った場合はどちらのコネクタなのでしょうか?
A4.Futaba仕様(Futabaロゴ付)のものはRCサーボ用の3pin平型コネクタ、HPI仕様のものは4pin箱型(HIROSEのDF11)コネクタになっています。RS303MR/RS304MDで4Pinのモノが必要な場合は、HPI版となっているものを御使用ください。
4番目の質問はパラメーターとは関係ないのですが、たぶんGロボを知っててJO-ZERO、ROBO-XEROを見られた方はアレ?っと思ったはず。
前から気になっていたので聞いてみました。
追加購入のときは気を付けないといけませんね。
という訳で、いろいろパラメータについて理解が深まった気がします。
また、RS-303,304の方が発売時期が後ということもあり、トルクだけで比較できない部分で改良されている所も多いみたい。
コストパフォーマンスもいいのでこれから買うなら303が良いのかなと思いました。
とは言え混ぜて使えないので、とりあえずウチはこれからも301をメインで使うでしょう。(ディアゴのRS306は大量にありますがw)












最近のコメント