
とりあえず、昨日の配置に適当にペンで線入れしてみた。
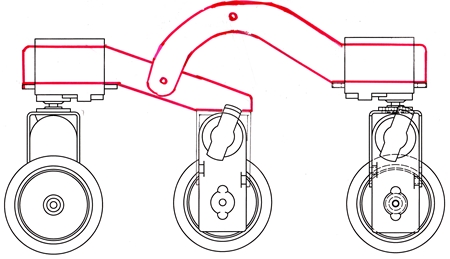
こんな感じかなぁ・・・。
で、やはり、気になるのは本体とのジョイントなんですが、昨日後輩のオータくんからもアドバイスもらって、「differential Joint」は「差動装置」のことじゃないかと。
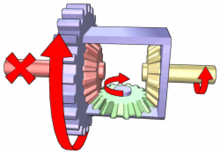
差動装置のデフギアを用いれば、いいんじゃないかって。
確かにデフピニオンギアを本体に設置して、ロッカーリンクの軸につけたピニオンギアでサンドイッチすれば、本体はロッカーリンクのねじれの真ん中の角度が担保されるよね。
素晴らしい!
そういえば、何気なく見ていた英語版のロッカー・ボギー機構の写真。
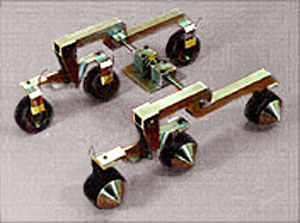
よく見ると、まさにそうなっている気がする。
なんか手ごろなギアデフの工作キットとかないかな。
RC用でボールデフのセットはいろいろあるみたいだけど、ボールってことは摩擦だから、緩むと滑りそうだよね。
なんかいいパーツないかねぇ。
実は、他にも教えてもらった回避策もあるのだが、コスト重視で回避策に回るか、実モデルを忠実に再現するか悩みどころ。









