
一番重要なロッカーボギー機構の設計です。
ちなみに、名称をロッカーボギーリンク改め、ロッカボギー機構に統一することにしました。
まずは全体像のイメージのために昨日設計したものを配置を意識してずらっと並べてみます。

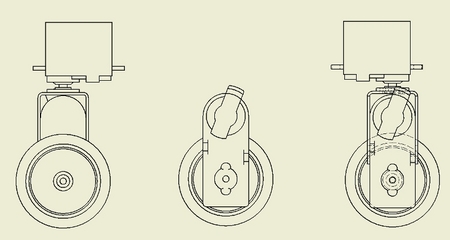
だいたい、完成予定としてはA4サイズに収まるくらいのサイズを想定しています。
それでサスペンションの機構の部分なのですが、論文を見ていると「ロッカーボギー機構」のモデルってだいたいこんな感じ(下図)なんですよね。
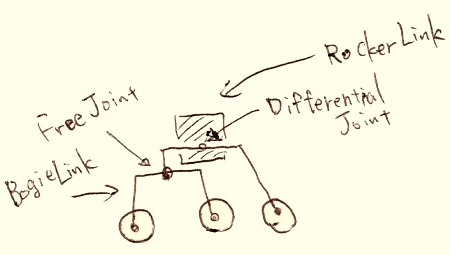
「Differential Joint」って結局どんなジョイントだよー。
ってなわけで、実際実機を作った東北大の実機モデルの写真をじとーっと見てモデルを書くとこんな感じ(下図)でしょうか。
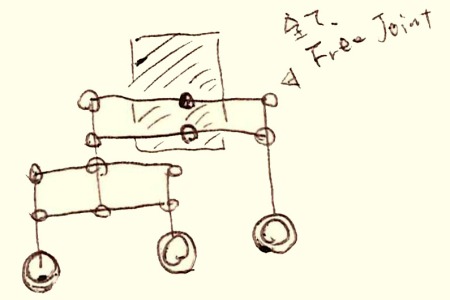
なんかラテラルリンクも組み合わせてるんで、ロッカーボギー機構のモデルとはちょっと違った動きをしそうですね。
結局「Differential Joint」が何なのかは分からず・・・
とはいえ、これもそのまま作ったのでは、安定していない状態なので、クシャっとつぶれますね。
結局、どこかにスプリングかダンパーを設置しないといけないのかな。
後輩は確か本体とロッカーリンク部に別のリンクをもう1つ設置してたような。
うーん。
一番重要なポイントなんだよね。
レゴでロッカーボギー機構を作った人がいたのでご紹介
2つ目の動画、どうやってバランスとってるんだろう・・・。










お久しぶりです。通りすがりの後輩です。
個人的な見解ですが「Differential Joint」とは、Differential:差動 という意味だと考えると、内部に差動装置(デフギアかな?)があるのではないかと・・・
左右のロッカーリンクのシャフトと、車体にかさ歯車をつけるのでは?
英語版のwikipediaのrocker-bogieのページにそれっぽい写真があります。
http://en.wikipedia.org/wiki/Rocker-bogie
「rocker-bogie」でgoogle画像検索などしても数件それらしき物がヒットします。
設計の参考にでもしてください。
ありがとう!
なるほど「差動装置」か。デフギアすごいな。
車のデフの構造もいまいちちゃんと調べたことなかったよ。
調べて分かったけど、海外では結構作ってる人多いんだなー。