
デフギアを使わない差動装置の設計ですが、シーソーとエンドロッドを利用して解決します。
この方法は、後輩が実際に使っていた方法で、元ネタは海外のサイトにあったらしいです。
(残念ながらサイトは消失しています。画像が手元にありますが、転載は控えます。)

材料はタミヤのロングユニバーサルアームセット (オレンジ)と3mmネジシャフトセットを利用しています。
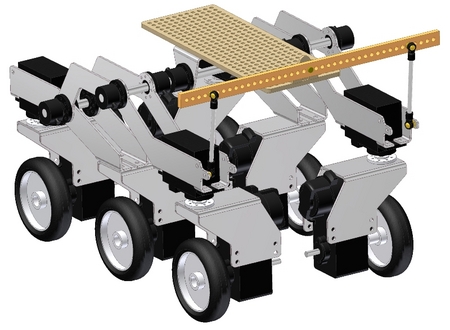
車体の設計はこれで大方終わりでしょうか。
CAD上での動作検証は今後の課題として、細かいネジ位置などの調整をすればもう切削に出せるかと思います。
しかし、切削を外注で行うと15,000円くらいかかります。
なるべくコストを下げるためにタミヤの工作セットを使う設計にしましたが、なかなか使いどころは少なかったです。
モーター等はあり余りの材料を使うものの、それも含めるとこのロボットにも10万超はかかってる計算になりますね。
やっぱりロボットは高い!w
(・・・でも、アルマイトもしたいなぁ・・・。)









