
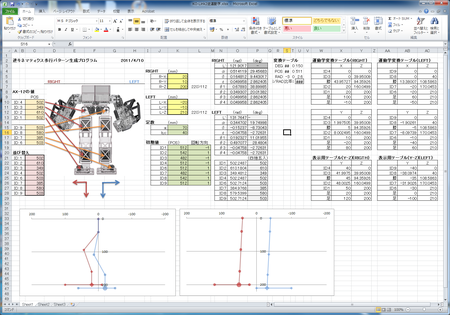
چً“ْ‚ج‘±‚«‚إ‹t‰^“®ٹw‚جŒvژZƒVپ[ƒg‚ةگ}‚ج•\ژ¦‹@”\‚ً‚آ‚¯‚ؤ‚ف‚½پB
‚¹‚ء‚©‚‚ب‚ج‚إپAŒِٹJ‚µ‚ـ‚·پB
پi‚¯‚اپAKO-Link2(399‚³‚ٌ‚ج•½چsƒٹƒ“ƒN‹r)‚إ‚µ‚©ژg‚¦‚ب‚¢‚ج‚إپA‚ ‚ٌ‚ـ‚èŒِٹJ‚µ‚ؤ‚àˆس–،‚ب‚¢‚©‚à‚—پj
ƒ_ƒEƒ“ƒچپ[ƒhپFKO-Link2‹t‰^“®ٹwŒvژZƒVپ[ƒg(Excel 2007Œ`ژ®)
‰©گF”wŒi‚جƒ{ƒbƒNƒX‚جXYZ‚ً“ü—ح‚·‚é‚ئپAگشگF”wŒi‚جƒ{ƒbƒNƒX‚ةAX-12‚ة‘—‚é‚ׂ«ƒ|ƒWƒVƒ‡ƒ“‚ھ•\ژ¦‚³‚ê‚ـ‚·پB
‚ئ‚¢‚¤‚ي‚¯‚إپA‚±‚±‚ـ‚إ‚إ‚«‚½‚çXYZ‚ة‰½‚جچہ•W‚ً•ْ‚èچ‚ق‚©‚ھ–â‘è‚ة‚ب‚è‚ـ‚·پB
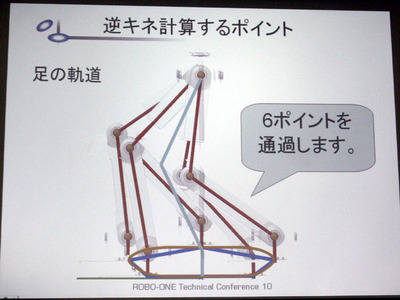
‚¢‚ي‚ن‚é•àچs‚ج‹O“¹‚إ‚·پB
‚±‚ê‚à‚¢‚ë‚¢‚ëچl‚¦•û‚ھ‚ ‚ء‚ؤپAژ©•ھ‚ھ‰ك‹ژ(KOKUTEN3)‚ةچج—p‚µ‚ؤ‚¢‚½•û–@‚إ‚ح
- گ³Œ·”g‚جگ³‚ج•”•ھ‚¾‚¯‚إ‘«ڈم‚°پiچ¶‰E‚ج‘«‚جˆت‘ٹ‚ً180پ‹‚¸‚ç‚·پj
- ‘جڈdˆع“®‚àگ³Œ·”g
- ‘«‚ج‘OŒم‚حچ¶‰E‚إˆت‘ٹ‚ً180پ‹‚¸‚ç‚·
‚ف‚½‚¢‚بپA—v‚·‚é‚ة‘«گو‚إ”¼‰~‚ً•`‚•àچs‚ً‚µ‚ؤ‚¢‚ـ‚µ‚½پB
‘¼‚جگl‚ح‚ا‚¤‚µ‚ؤ‚é‚ج‚©‚بپ[‚ء‚ؤ‚±‚ئ‚إپA—L–¼‚ا‚±‚ë‚ً‚ ‚½‚ء‚ؤ‚ف‚é‚ئپB
ƒgƒRƒgƒRٹغ“I‹O“¹
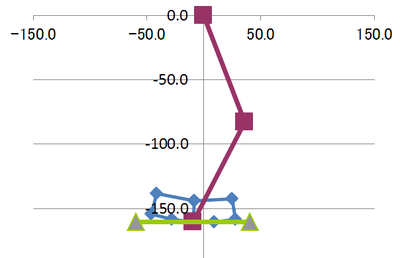
‚¢‚ë‚ٌ‚ب‹O“¹‚ً•`‚¢‚ؤ‚¢‚ـ‚·‚ثپB
‚ا‚؟‚ç‚ة‚àŒ¾‚¦‚邱‚ئ‚ب‚ج‚إ‚·‚ھپA’n–ت‚©‚ç—£‚ꂽ‚ç‚·‚®‘O‚ةڈo‚·‚ج‚إ‚ح‚ب‚پA‹َ’†‚إ‚·‚±‚µŒم‚ë‚ةڈR‚ء‚ؤ‚©‚ç‘«‚ً‘O‚ةڈo‚·‚ج‚ھƒ|ƒCƒ“ƒg‚ف‚½‚¢‚إ‚·‚ثپB
‹r‚ج‹O“¹گ¶گ¬‚جƒvƒچƒOƒ‰ƒ€‚ئ•\ژ¦چؤگ¶‚جƒvƒچƒOƒ‰ƒ€‚ھچ،Œم‚ج‰غ‘è‚إ‚·پB









