
さらに進化を進めて
- 歩行軌道の生成
- 軌道座標からサーボの目標ポジションの演算
- 角速度の上限値チェック
を実装し、一通り歩行のモーションを出力できるようにしました。
軌道に関しては、「五角形軌道」を採用しました。
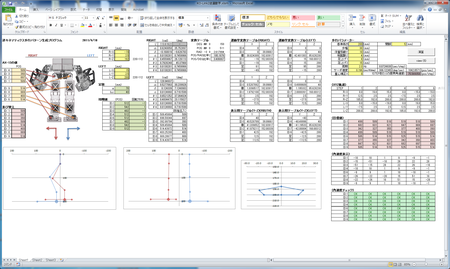
歩行軌道パラメータを入力すれば、あとは軌道生成から出力値の生成まで自動でやってくれるので、出力された48個の値をCM-5のモーションエディタに打ち込めば、モーション完成です!
(48個の数字の打ち込みも自動化したいのが本音ですがw)
分かりやすく動画を作ってみました。
(相変わらずの自己満足動画ですw)










足先の五角形軌道、接地中の直線部分に点がもう一つ増えた方が安定しそうな気がしますけど、どうなんでしょう。
・・・どうなんでしょう!?w
おそらく、分割する軌道の点は多ければ多い方が軌道からの誤差は少ないと思います。
ただ、考えるべきは「軌道」と、そのポイントの「通過速度」に関しても重要になってくると思います。
どちらも文献が無いので、過去の吉村さんのROBO-ONEカンファレンスの五角形の軌道をそのまま採用しました。
軌道自体、五角形がベストとは思いませんので、どうせ分割数を増やすなら100%理想の軌道で計算したいのですが、そんな論文を探しています。
チェビシェフリンク機構の先端軌跡なんか良さそうですが・・・ほぼ等速の擬似直線の早戻り機構なので、両足接地状態がありつつも滑らず移動できるはず。
最近高専ロボコンの二足歩行ロボットでもよく使われてますね。
>>チェビシェフリンク機構\r
興味深い機構ですね…。
リンクだけでこんなに動くのが面白いですね。
さてソフトウェアで歩行軌道をちゃんと正確に実行しようと思ったら、マイコンじゃなくてパソコンでリアルタイム演算した方が良さそうですね。
そうなるとKO-Linkでは厳しいので直接VBAから制御しやすそうなG-ROBOTが良いかなと思うのですが、VBAとG-ROBOTの接続ってUE村さんもう作られてるんでしたっけ??
どうせならリアルタイム実行できる逆運動学のエクセルシートを作ってみたいと思います。
かわさきロボットではかなり初期から使われていた機構です>チェビシェフリンク
PCからGロボ直接制御だと、RPU-10のRS485通信機能使った方が良いかと思われます。要するにRPU-10をRS232C-RS485変換機として使う機能で、パケットの書式は下記のRPU-10の技術資料参照。
http://www.futaba.co.jp/robot/download/manuals.html
VBAのサンプルはサンプルプログラムのダウンロードのところにあるのでそちらもご参照ください。