

�N���ɂw�x�y�̌v�Z�ɂ��āA�C������ď��������̂̔������Ȃ��܂��A����Ȃ��[�Ǝv���Ă���ł����A�����l�b�g�p�j���Ă����l�`���������̂Ƃ��ƁA���E�Z�p�������ŏЉ��Ă��邶��Ȃ��́I��
�v�X�Ƀ��`�x�[�V�������オ��܂����I�I�I
��������Ō�Ń����N�W�ɒlj����Ă��������Ƃ�
�ŋ߂͂Ƃ����Ɗw�Z��Autodesk Inventor�Ő}�ʂ������Ă���܂��B
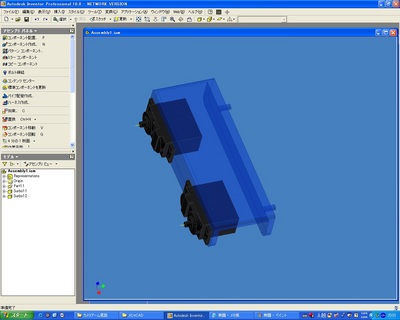
����́A�Q�����s�p�ł͂Ȃ���ł����ǂˁB
�ĂɃ��X�L���[���{�b�g�R���e�X�g�ڎw���ĂāA���̐R�����ޗp�Ȃ�ł��B
���N�Q�������`�[���̏��ނ����Ă݂�ƁA�O�N�̃��{�b�g�̎ʐ^���g���Ă킩��₷�����������Ă����ł���ˁB
���߂ĎQ������l��͎ʐ^�ȂȂ��̂ŁA���̃A�h�o���e�[�W�߂�̂ƁA�����ł���ۂ�ǂ����邽�߂ɂ������K���Ő}�ʕ`���Ă܂��B
������ƑS�̉摜�͌������Ȃ���Ńp�[�c�����ł����A�R�c�b�`�c���ăz���g�֗����ȁ[�ƁB
���Ȃ݂ɁA�ܐ�t�������f���ł����A������Ƃb�`�c���I���܂ł͐G�ꂻ���ɂȂ������G�G�G










�����́B
�uXYZ�ő��ʒu������y�������I�v�̃y�[�W
�}������₷���ėǂ������ł��B
���̎c���(���[�V�����Đ������Ɩ�������)���I�������A�t�^���w�v���O�����Ƀ��[��������lj����悤�Ǝv���Ă��܂��B
���A���^�C���v�Z�ł͖����̂ł����ǂˁB
����ł́B
>�}������₷���ėǂ������ł��B
���肪�Ƃ��������܂��B
���������Ă���������ƁA������b�オ����܂��I
���������[���͂܂����_�����Ȃ̂ŁA���R��������������Ă��܂��B
�R�������͍������m�ۂ���̂��Ȃ��Ȃ��������ł��B
����ɂ���
����ӂƋC�t�����̂ł����A�t�^���w�̐����y�[�W�ł̃_�u���T�[�{�̂Ђ��T�[�{�ɂ��Ă̐���
> ���̂Ƃ��_�u���T�[�{�̎�(��21)�Ǝ�(��22)�����Ԓ����͒n�ʂɑ��Đ����ƂȂ�܂��B
�́A�r��O�ɏo���Ƃ��͗ǂ����ǁA�r����ɏo�����Ƃ�������Ƃ�������邢�����ł��ˁB
���x�_�u���T�[�{�����鎞�ɂ͂Ђ��������Ҋ߂Ƒ�������Ԓ����ɕ��s�ɂȂ�悤�Ȍv�Z������낤�Ǝv���܂��B
>�r��O�ɏo���Ƃ��͗ǂ����ǁA�r����ɏo�����Ƃ�������Ƃ�������邢�����ł��ˁB
�m���Ɍ����ڂ́A�O�ɏo���Ă����ɏo���Ă������ł��ˁB�i��
�m���Ȍv�Z���ȒP�ɍs�����߂ɂ������Ă��ŁA���x�𗎂Ƃ��āu��������Ԓ����ɕ��s�v�ɂ���̂Ȃ�P���ɗ��T�[�{�Ƃ����������n�j���Ǝv���܂��B
�Ƃ肠�����A���m�Ȃw�x�y�͒u���Ƃ��ăT�[�{2�̊p�x�����v��2���ɂȂ�A���������͕ۂ��܂��̂ŁE�E�E�B
�u��������Ԓ����ɕ��s�v�ɂ��A������܂߂Đ��m�ɂw�x�y�����߂�Ȃ�A�_�u���T�[�{�̎��Ǝ������Ԓ������X�����Ƃ��ɔ�������w�������l������K�v������܂��ˁB