
サークルでレスキューロボットコンテストに出るのですが、ロボットアームを作るため、高トルクなサーボが必要となり、ベステクから出ているROBOTISのDynamixel RX-64を使うことになった。

プロトコルは、AX-12と同じなんで、問題はなく・・・
というか、公開しているAX-12用のプログラムでそのまま動きました。
RX64が動くなら、DynamixelシリーズはすべてOKですね。
むしろ問題があったのは、TTLからRS485への変換回路。
AX-12とは違ってTTLではなく485に変換するため専用のICがひとつ必要なのですが・・・
下の回路図にだまされました。
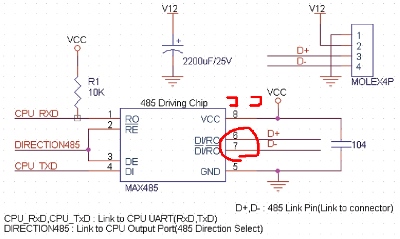
6と7の順番が入れ替わってるとか気づきませんて;;;
誤植とかじゃなくて、この通り作ったら動きましたが、一度は逆に接続してICが燃えました。
ちなみに実測ですが、18V/2Aで41kgf・cm出てました。
21Vで本当に64kg出るかどうかは謎ですが、KONDOの4000番より強いのは確かですね。(相応の電圧かけてるから当然ですが。)
実際大会用のマシンはこれを3:1で減速して180kgf・cmのサーボとして使用する予定です(ニヤリ










最近のコメント