今度レスキューロボットコンテストに出場するのですが、今、そのロボットのロボットアームのサーボモーターに悩んでます。
ベストテクノロジーから発売されているDynamixel RX-64が64kgfcmの出力を出してくれるので、これなら行ける!・・・と思って購入したのだが、実際定格電圧を超える24Vまで印加しても64kgfcmのトルクを出力することはなく、熱ダレはひどく、角度も保持するのがやっとで、とても使い物になるものではなかった。
KONDOの40kgfcmでは役不足力不足で、ちょうどいい値段でちょうどいいトルクのサーボがない。
しかもDynamixel RX-64は4万もするサーボなのだが、使い物にならないことが分かる前に、追加注文をしてしまったせいで先生にはこっぴどく怒られてしまった(゚_゚i)
新しいモーターを買う予算もないし・・・こうなったら自作しかない!!!!
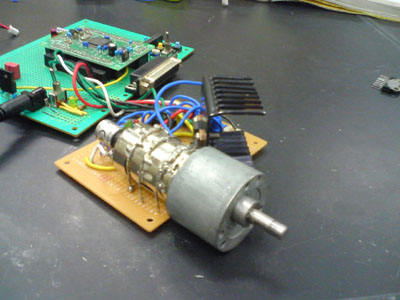
そこで、よくロボコンに用いられるモーターにタミヤのギアードモーターがあるのだが、このモーターのシリーズで一番減速率の高い300:1のギアボックスがある。
7.4Vの電源でも最大効率時30kgfcmのトルクを出しスピードもそこそこ出る、高負荷時はスピード落ちるものの粘り強く100kgfcm以上のトルクを発揮してくれるモーターである。
こいつを使って、サーボを作れば、サーボ自体の重さは数百gになってしまうが、トルクの面ではかなり行けるのではないかと思い、こいつをサーボ化することに決定した。
ここで、まずRCサーボの制御基盤にタミヤのギアードモーターを接続する方法を考えたのだが、実行してみると発振して使い物にならなかった。
やはり制御も自分で書かないとダメってことですね。
そこで、出力軸を制御するポテンションメーターをやめて、減速する前のモーターを制御することにした、これなら通常のサーボの300倍の解像度が出ると思ったからである。
ちなみにポテンションメーターでは、回転角度に限界があるので、ロータリーエンコーダーを使う。
欠点としては再起動の度にキャリブレーションが必要となることである。
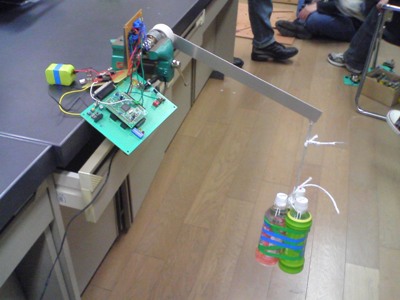
そして出来たものが下の写真。
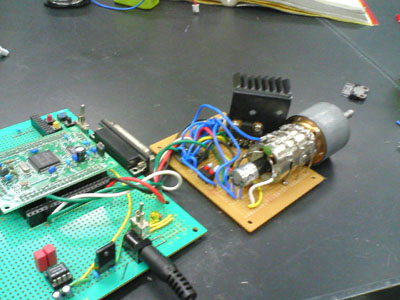
ビンゴ!
最終的にPIDで制御するつもりですが、ON−OFF制御でもこの解像度ならそれなりに位置止めできることが分かりました。
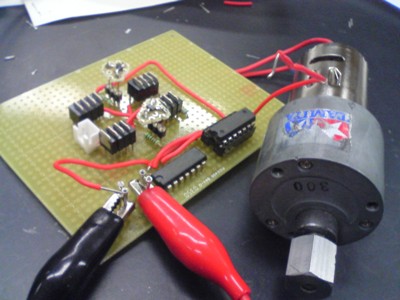
ただ、ここで新たな問題が発生。
モータードライブ回路にTA8429を使用しているのですが、これを使うとバッテリー直つなぎのときよりモーターの出力がひどく落ちる。
電圧降下と電流の上限が厳しくて、モーター本来のパワーを発揮できません。
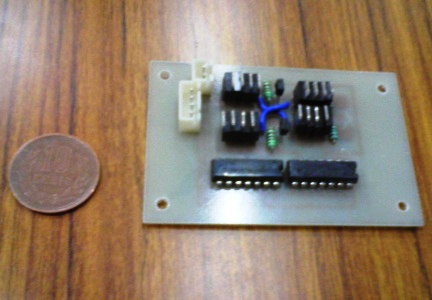
というわけで、ここで、元祖「俺サーボ」の宮田さんのモータードライバを使用することにしました。これなら20Aまで行ける(らしい)ので、期待してます。
部品を注文したので来週にはテスト出来るかな。















最近のコメント