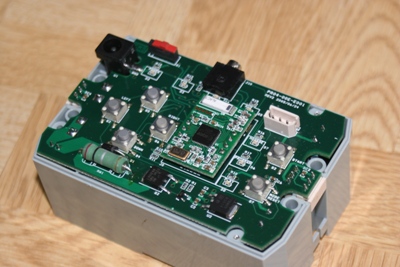
ロボット王国で注文していたZigBeeが届いた。

さっそくCM-5に接続!
というわけで、今日はここまでwww
通信とかはまた来週以降ということでw
今日のロボットの作業と言えば、研究で使うAIMOTORのCADを書いてみた。
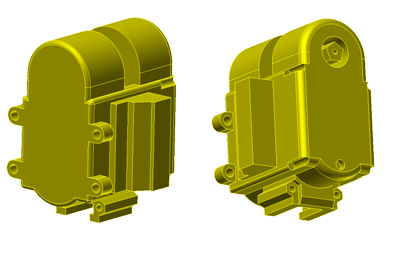
穴はしっかりと計測したけれど、あとは干渉チェックに使うだけなので、全体の精度はこんなもんでいいだろう。

ロボット王国で注文していたZigBeeが届いた。
さっそくCM-5に接続!
というわけで、今日はここまでwww
通信とかはまた来週以降ということでw
今日のロボットの作業と言えば、研究で使うAIMOTORのCADを書いてみた。
穴はしっかりと計測したけれど、あとは干渉チェックに使うだけなので、全体の精度はこんなもんでいいだろう。
Bioloid専用ZigBeeモジュール ZIG-100A(BTX037)

ツクモロボット王国にお願いして置いてもらいました。
納期は2週間ほどということで、注文しました。
PS:
ベステクから昔発売されていたBTX020 AIMOTOR601。
誰か3DのCADデータなんて持ってないでしょうか?出来ればInventorで読めるので・・・。

昨日の話なんだけど、はじめて釣堀と言うものに行ってきました。
小学校の頃に一時期ルアーフィッシングにはまって、よく池に行ったり、海でサビキとかしてた時期があったのですが、釣堀というのは初めてでした。
貸してもらった竿は、リールの付いていない竿でした。
入れ食いなんだけど、針に返しがないのですぐに針から外れてしまう;;
結局、釣果は、2時間で鯉4匹。
結構面白かったな。
掃除をしてたのだが、ロボットの資産が今どうなっているのか現状が把握できていなかったのでまとめてみようと思った。
と、同時に、ファームとか全部アップデートしてみた。
CM-5のファームフェアを1.13から1.14へ
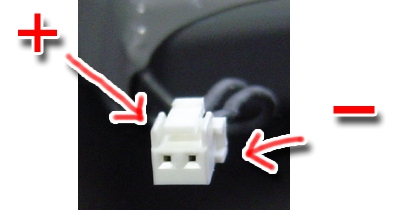
そのとき、今後リポに変えることも考えて両方とも黒のケーブルでつながっているCM-5の電源のピンアサインを調べておいたのでメモ。
今のDreamDriveのロボットのアクチュエーターの資産状況
KUMACO
・ HSR-8498HB(Hitech) * 13
SARUBO
・ S-3003(フタバ) * 8
平行リンクロボ
・ AX-12 * 16
未使用サーボ
・ HSR-8498HB(Hitech) * 6
・ KRS 2350ICS(KONDO) * 3
・ PDS-747fet(KONDO) * 1
・ TP-S3003(TAMIYA) * 1
・ DS R8801(JR) * 1
・ DS R3801(JR) * 1
・ RS301CR-H12(フタバ) * 1
死亡サーボ
・ AX-12 * 7
・ HSR-8498HB * 2
ここにG-ROBOTSが加わりました。
うーん。やっぱり小型サーボが多い。
あと、KOKUTEN用の基盤を作ったときに、汎用性と高めようといろいろサーボに手を出したときの影響でペアにならないサーボの多いこと。
ハリボテロボが作れそう。
死亡サーボもたまっていくけど、どうしよう。
前は修理してもらえたんだけどなぁ。
それと、頂いたサーボが意外と多い。
これは本当にありがたいと思う。
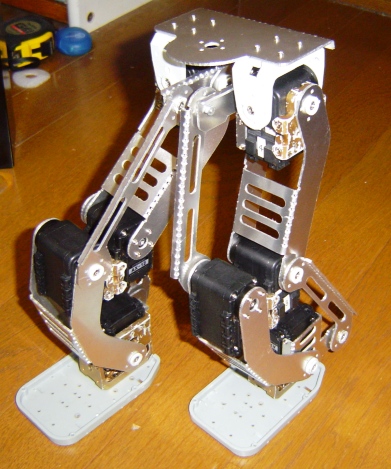
徹夜で両足が出来た。
ここから先、上半身はあまり考えてないので、考えていこう。
条件としては
・ AX-12はあと8個
・ AX-S1搭載
・ 制御基盤にCM-5を使う
・ リポ搭載
・ ZIG-100A搭載

さて、HPI賞のG-ROBOTSが届きました。
この3連休に組み立ててレポートを書こうと思います。
が、この3連休いろいろ予定が・・・忘れないように。TODOメモ
・ G-ROBOTS組み立て
・ ZIG-100A注文
・ 久々に釣りに行く
・ フリーマーケット
・ KUMACOぷろじぇくとのHP更新
・ 簿記検定の申込み
・ ROBO-ONEで汚染した部屋の片付け。
よし、頑張るか。

平行リンクを仮組みしてみた。
適当に動かしてみた。(動画暗くてすみません。)
剛性が少ないAX-12がグニャっても上下にしか動かないのでバランスがいいのが嬉しい。
PS:HPI賞の景品が届いていたのだけれど、不在で受け取れず、明日の午後9時に届くことに。
待ち遠しい〜〜〜(o=´ー`=)o
宇宙大会予選・・・面白そうだなぁ。
やってみようかなぁ。
今回、のむむさんのリアクションホイールが気になった。
リアクションホイールは、外乱トルクとは反対方向のトルクを発生し、外乱トルクによる角運動量を吸収蓄積して、衛星の角運動量を除去する姿勢制御アクチュエータである。 しかし、リアクションホイールにおける角運動量の蓄積量には限界があり、これが限界に達すると、姿勢制御が不可能となる。
端的に表してるのはこの動画かな
http://jp.youtube.com/watch?v=v67VgBh8VTo
なるほど。
確かに言わんとすることは分かる。
しかし、あのロボットの質量に収まるリアクションホイールで手でなげた時の外乱を制御するのは可能なのだろうか・・・。
1mから落としたときのあの一瞬で制御可能なのだろうか。
ネコが空中で姿勢制御する話はよく例に挙げられるが、1mの高さから外乱のある投げ方をされてネコは立てるのだろうか・・・。
今回の大会で、テンパって2mの高さから投げちゃいました。ってハプニングがありました。
「衝撃」の意味では1mでも厳しいが、制御として考えるとどうなのだろう。
1m落下する時間は0.45秒。
SH2/7144だと21600000クロック
ジャイロや加速度センサを使ったとして、AD変換に時間はかかるわけで
サーボでバランスを取ろうと思うと、0.45秒で動ける角度はせいぜい150度
マイコンの制御でどうにかしようってのは、無理そうなので、物理的にリアクションホイールで補正をかけるアイディアはいいなぁと思いました。
それと、あんがい、高く投げるほうが「解」なのではないかと思う。
(あくまで制御が完璧として)
アイディアで勝負できることが面白いなぁと思います。
というわけで、ちょっと検討してみたいと思います。
ただ、今後、大会がただの「運試し大会」にならないことを祈りますが(ちょっと辛口
みなさん、お疲れ様でした。
KUMACOに関してはKUMACOぷろじぇくとの方にかわらが書いたとおりなんで、詳しくは割愛しますが、とにかくマイコンに大電流流して、動かなくなった瞬間はびっくりしました。
死んだのはI/Oの1ビットだけで、CPUそのものが死ななかったのは不幸中の幸いでした。
今回ROBO-ONEを振り返って、とにかく韓国が強いなと感じる大会でした。
とにかくDynamixelを見直しました。
このホームページでもDynamixelネタは良く取り扱っていますが、本当にすごいサーボだと思います。
RX-64を全身に使われると日本製サーボじゃ太刀打ちできませんね。
日本製だと現状大型の利根川のサーボくらい使わないと勝てないかもしれませんね。
これを使うと、なにか別の路線が生まれそうですが。
今回韓国のチームで関心したのはAX-12+でザクザク動くロボットがいたこと。
2日目には出てませんでしたが、かなり感動しました。
物は使いようというか、同じサーボを使っていたからこそ分かる実力の差を感じました。
バイオロイドを買ったもののCM-5を使わず自力でマイコンをやってきましたが、平行リンクロボにはCM-5を使ってみようと思いました。
あと、全体的に思うのですが、毎回言ってますが(笑)とにかくサーボはシリアル通信の時代だと思います。
ベンチャーとかで新しいサーボコントローラーがどんどん出てますが、PWMではなくどんどんシリアル通信のボードの方にも力を入れて欲しいと思います。
今回、KONDOサーボ、Dynamixel、Futabaサーボなど、シリアルで通信してる方と話していて確認したのですが、やはり「ジッター音=位置決めの制度」と「バッテリーの継続時間」に置いてかなり差が出ていると思います。
僕もシリアル通信サーボ推奨派です!
(とはいえ、KUMACOはPWMなんですがね(苦笑)
さてさて、前振りはさておき(笑)、今回本当にHPIさんには感謝しています。
今回HPI賞をいただいて、本当にいい思い出になりました。
G-ROBOTSは今、一番触りたかったロボット。
ぬいぐるみにいれてもある程度の軸数を確保できそうな小型なサイズ・何と言ってもシリアル通信サーボ・安全性に優れたリポバッテリー。
本当にありがとうございました。
ROBO-ONEは、大学1年の時から足を運んでいて、今年で4年になり二足歩行ももう少しで4年目になるのですが、初めて賞をいただきました。
呼ばれた瞬間はほんとにテンパってしまって、周りが見えてなくて、あとから考えると、どんな風に見えたのかちょっと恥ずかしいですw
さておき、継続は力なりといいますが、これからも頑張って行きたいと思います。
PS:うどん食べましたか〜〜〜〜??(w

KUMACOの調整を行いながら曲げてしまいました・・・。
CADで作ったとおりだーーー!!!
しかも、サーボに合わせるとぴったり!!!!
しかし、あと1日。
明日は朝から夕方までゼミなんで・・・。
さすがに、ROBO-ONEに持って行くのは無理かなぁw

さきほど、ヴィストンより切削済みのアルミパーツが届きました。
ほぼ1週間で完了しました。
たまたま、仕事が空いていた時期だったみたいで、普段はこんなに早く来ることはないようなのですが・・・とにかくラッキーでした。
ROBO-ONEに向けてKUMACOの調整をしているので、平行リンクロボは来週以降・・・のつもりですが。
たぶん、組み立てちゃうんだろうなーww
それにしても、ホントにキレイ!!
今回、ROBO-ONEの高松は、僕の故郷であり、会場も実家から徒歩圏内なので、せっかく、高松に来てもらえるなら・・・
ということで、うどん特集作ってみました。
http://dream-drive.net/udon/index.shtm
高松にお越しの際はぜひぜひ、おうどんを食べていってください。
旅行から帰ってきました。
旅行前にヴィストンに注文していたため、旅行中にメールの返信が出来ずヴィストンさんには迷惑かけました。すみません。
帰ってきて、DXFファイルを送ったところ、ちょうど予定が合ったようで、3回ほどファイルの修正を行って、早々の切削開始になりました。
1週間ほどで完成品が送られてくるそうで、楽しみです。
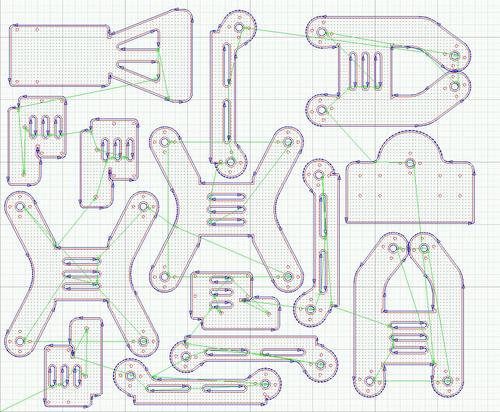
下の図面はヴィストンから届いた切削の道順。
スペースが多いので、頑張ればもう1パーツくらい配置出来たかもしれませんが、とりあえずもう一回切削してもらうつもりなので今回はこれで出しました。
見てきました。
昨日、公開初日にばっちりと!!ww
前半はアニメ版とほとんど同じだったのですが、アニメ版のセリフを覚えてしまっていたせいで、細かいセリフの違いや設定の違いが、気になって…気になって…落ち着きませんでした。
セリフ覚えるってどないやねん!って話ですが、エヴァだけは小学校時代からの熱狂的なファンですもんで・・・w
後半は、アニメ版とはかなり描写が違っていて、新鮮でとても楽しめました。
CG技術の発展で、爆発の激しさとか演出が派手でかっこよかったものの、人物はキレイすぎて逆に表情を崩しての感情表現がなくなっていたのは残念かも。そのぶんシリアスな感じはより表現出来てますが。
ストーリーに関してはネタバレ含むから・・・まぁ・・・見ましょう(笑
アニメよりはセリフ内に解説が多いから分かりやすいカモ?
さて、今日からサークルの同期の仲間と九州行ってきます!
大阪に行ってそこからフェリーで13時間かけて、宮崎へ。
宮崎と鹿児島を堪能してきます!!
帰りは6日です。では、行ってきます〜
PS:KUMACOの審査モーションまだ出来てません;;










最近のコメント