
成功しました!
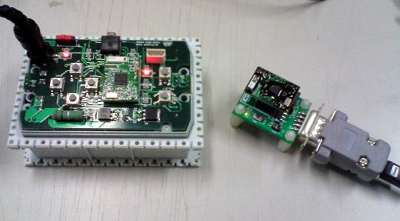
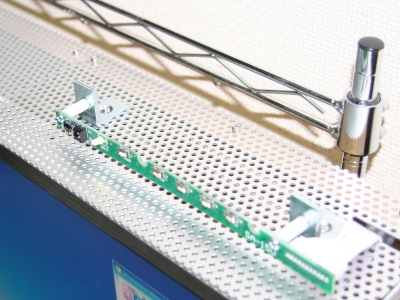
CM-5にZigBeeを載っけて、パソコンのZigBeeと通信に成功しました。

パソコンから0.5秒ごとにコマンドを送ってCM-5のLEDを点滅させる動画
動画で見ても面白くないですね(笑
CM-5はATmega128なので、シリアルポートは共有してる!の仮定は間違っていたようです。
CM-5のZigBee専用のプロトコルしか受け付けないようです。
1 バイト目:0xff 固定
2 バイト目:0x55 固定
3 バイト目:DATA の下位8 ビット
4 バイト目:DATA の下位8 ビットを論理反転
5 バイト目:DATA の上位8 ビット
6 バイト目:DATA の上位8 ビットを論理反転
ただ、CM-5からZigBeeで送られてくるパケットは、シリアルポートの情報も混じって送られてくるため、まだうまく受信できてません。
なぜ、シリアルの情報が混じっているのかも謎ですが、もう少しいじってみる必要がありそうです。
とりあえず、パソコンからCM-5に一方通行でも通信できたので、少なくともフィードバックなしでも、コントローラーで操作出来そうです。
ここまでVisualStudioで作ってきましたが、GUI関係はHSPの方が慣れてるんでこっから急造仕様でコントロールのプログラム作ろうかなぁと。
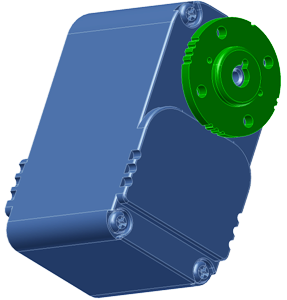
せっかくROBO-ONEでHPIさんからG-ROBOTS頂いたのにDynamixelばっかり触ってて申し訳ない気もするんですが、このロボもROBO-ONE前から設定してたんで、ロボファイトはこいつでいけるところまで頑張ってみようと思います。
G-ROBOTSもCADデータ頂いたんで、次のKUMACO用にぽつぽつ設計はじめてます。一応w












最近のコメント