
久しぶりのロボットネタです。
最近特に目新しくもなくなった平行リンクですが、2年前に平行リンクを設計した時から、「ロール軸もリンク化できないか?」と考えていました。
ロール軸もリンク化出来ればモーター数を減らしつつ、関節数を妥協せずに軽量化できるハズですよね。
というわけで、KO-Linkと同じく2年越しの具現化・・・というわけで、CADに起してみました。
じゃーん。
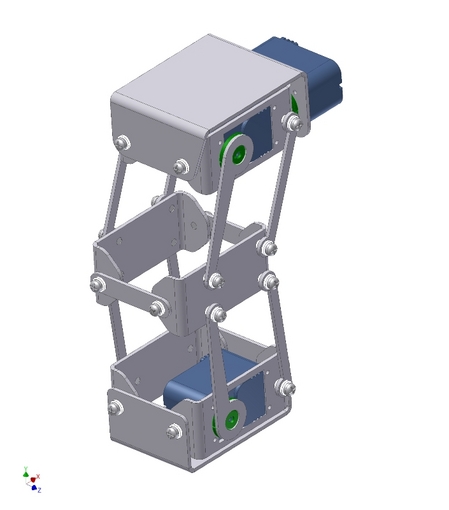
通常の平行リンク的屈伸。
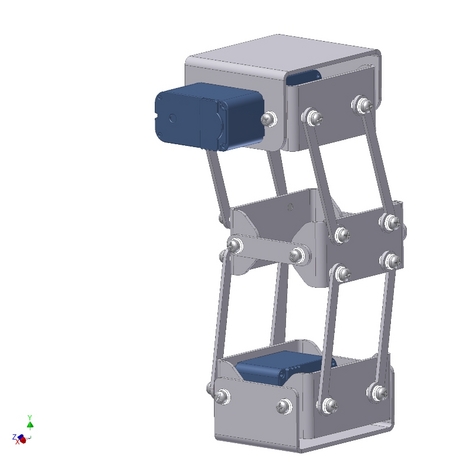
後ろから。
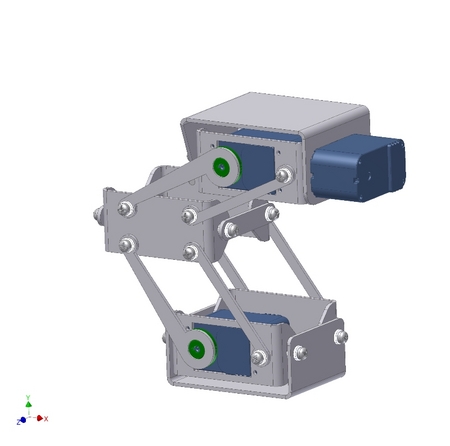
そんでもって、ピッチ軸のリンク化。
強度もさることながら、屈伸すればするほど外部からのモーメントの影響を受けやすくなるリンクの欠点が顕著に影響しそう。
そして、腰のピッチ軸のモーターの位置は左右逆につけるべきでした。
これからコツコツブラッシュアップしていこうかな・・・。









