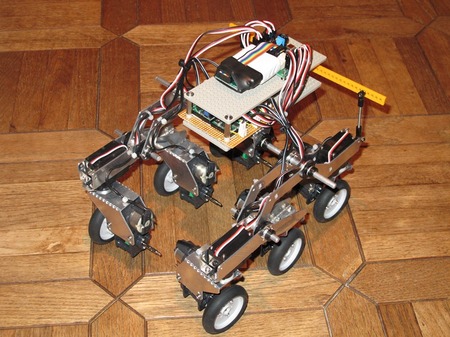
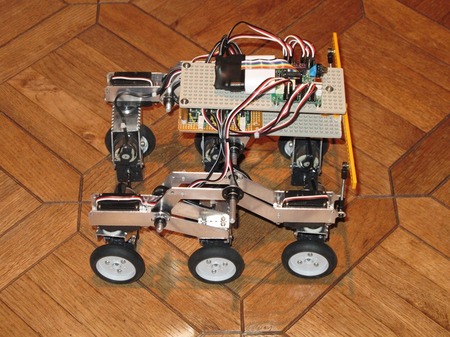
走行テストしました。
結構シャキシャキ動きます。
愛嬌で挨拶モーションも作ってみました。
走行中ドリフト気味なのは、操作主の問題。改造すればロボットのサバゲ仕様にも出来るかな。
悪路の走破能力はちょっと低かったので、調整が必要みたい・・・。
簡単にドリフトするくらい摩擦が低いのも走破性能的には問題です。
とりあえず平地でのテストのみ動画公開です。

走行テストしました。
結構シャキシャキ動きます。
愛嬌で挨拶モーションも作ってみました。
走行中ドリフト気味なのは、操作主の問題。改造すればロボットのサバゲ仕様にも出来るかな。
悪路の走破能力はちょっと低かったので、調整が必要みたい・・・。
簡単にドリフトするくらい摩擦が低いのも走破性能的には問題です。
とりあえず平地でのテストのみ動画公開です。
設定画面を作りこんでみました。
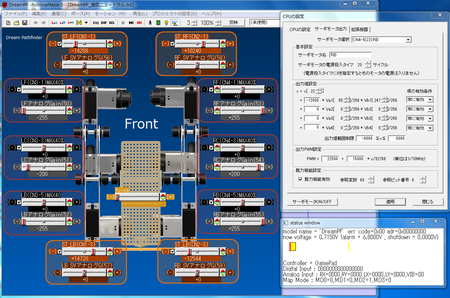
プログラムはモーターの即値代入とスライダの関数を利用して、アナログスティックベースの操作コマンドを実装中です。
前後進・旋回はだいたい完成しました。
スローラム走行とかアルゴリズムは考えてるんですが、三角関数が使えないのでどうやって実装しようか悩みどころ。
とりあえず、今日中に1本くらいは動画で公開できそうです。
先日ハードウェアを完成させた際にテスト稼働をしたのですが、輻射ノイズが近くのテレビに影響するほど発生しているので、とりあえずノイズキラーコンデンサを設置。
さて、プログラムに入るわけなのだが、まずは定格3Vのモーターに対して出力電圧が7.4Vのため、ソフトウェアの出来るだけ低いレベルでリミットを設定してやる必要があります。
というわけで、こんな感じでRoboVie Maker2の値とデューティー比の対応を調べました。

オシロスコープは秋月で以前購入したやつですが、どうも附属のモニタでは周期がうまく拾えず、附属のソフトウェアでWindows上ではいい感じに拾えました。
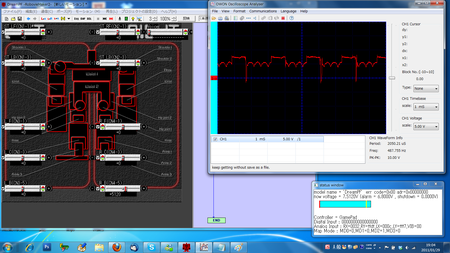
ステップは標準のままで、だいたい出力値を-6000〜6000くらいに制限することでデューティー比最大50%弱に制限出来るようです。
地元のPTA主催のサイエンス教室に参加してきました。
2回目の参加です。



子供はとくかに”操縦”をしたがるので、今回はガチなバトルロボットは無し。
香川ヒューマノイドロボット研究会、なんだか体験操縦用のロボットがどんどん増えてるw
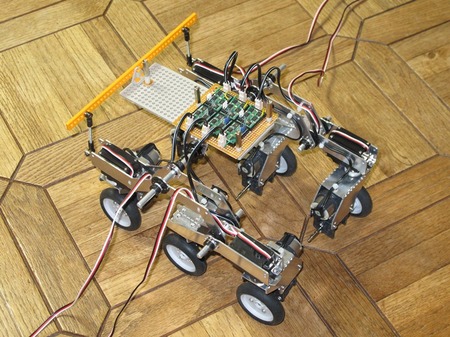
徹夜の甲斐もあって、電源をつないでプログラミング・・・の直前まで完成!!
つまりハードウェアの完成。
定格3Vのモーターを7.2Vで制御することになりそうなので、あまりデューティー比上げすぎるとモーター焦げるかも・・・。
ってことで、そのあたりのさじ加減も心配なので、コーディングはシャキッと起きた時に頑張ります。
メイン基板はVS-RC003を採用しているので、プログラム自体は無問題。
スピーカーも接続予定なので、車輌ロボで愛嬌のあるモーションを作るというのも面白そう。
あ、とりあえずロッカーボギーの能力の検証が最優先でしたねw
あと今回制作するにあたって材料費をすべて記録しているので、後日公開できると思います。
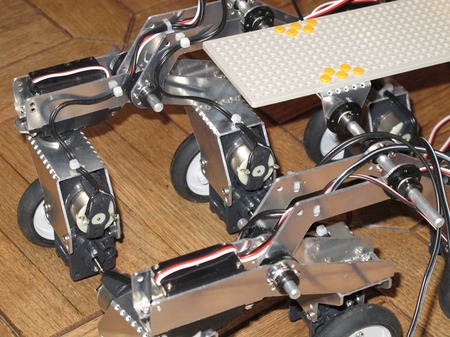
とりあえず、昨日作成した基板を接続して、本体1段目完成しました。
1段目??
ハイ。次は2段目です。
このまま寝ずに作業したいと思います。
高知での大会から仕事も忙しくてあまりロボットに時間を割けずにいたのですが、ここ最近、時間が取れるようになったのでまとまった時間でロボット弄ったりしてます。
やはりなかなか、まとまった時間でないと、ゲームや漫画と違って、モチベーションが上がりませんね。
で、作ったのがこれ。
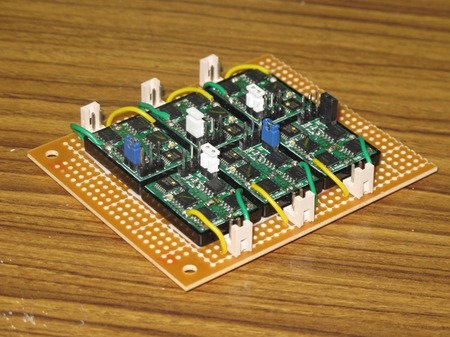
ハイ。
UMD-280を6個並べただけですね(笑)
そして配線。
こっちは結構頑張ってます。
まぁ、頑張って考えたのは設計の時の話ですが、設計の段階で考えていた配線が思いのほか上手く行ったので満足。
週末にかけてハードは一気に作り上げようかなと考えてます。
昨年も非常に皆様にお世話になりました。
ロボット活動も昨年と同様なスタンスで、イベント参加するようになると思いますが、見かけたときはまたよろしくお願いします。

ここ数年、ロボットを全面に押し出したデザインの年賀状なのですが、ロボット関係の方って、ホームページとかSNSでの交流が多いため、メールも住所もほとんど知らないことに気が付きました。
もし年賀状OKな方は、今度こっそり教えてくださいm(__)m
(注)背景はmixi年賀状のP4の年賀状のパクリです。
一応、先にカミングアウト。










最近のコメント