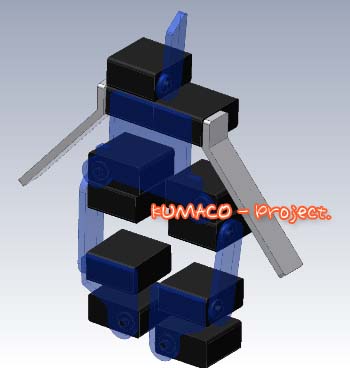
船場ロボットファッションコンテストへむけてKUMACOを大改修中。
重量が増えても、ちゃんと舞台で歩けるように、とうとう膝軸を追加することにしました。
Meros、KUMACO、と、いろいろ膝なしロボットを作ってきましたが、ちょっと限界を感じました。
拘束された中でのぎこちない動きというのも可愛いのですけどね。
というわけで、今のところの予定の設計がコレ
上半身はとりあえず変わってません。
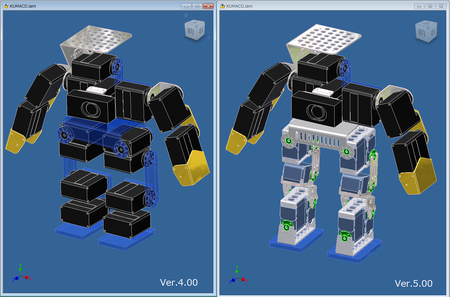
Ver.1の時と比べると、えらい変わりようですw


船場ロボットファッションコンテストへむけてKUMACOを大改修中。
重量が増えても、ちゃんと舞台で歩けるように、とうとう膝軸を追加することにしました。
Meros、KUMACO、と、いろいろ膝なしロボットを作ってきましたが、ちょっと限界を感じました。
拘束された中でのぎこちない動きというのも可愛いのですけどね。
というわけで、今のところの予定の設計がコレ
上半身はとりあえず変わってません。
Ver.1の時と比べると、えらい変わりようですw
台湾版のロボコンマガジンの見本誌が、オーム社より届きました。
5月号に掲載したネタを、翻訳して台湾版に載せていただけるということで、お話をいただいたのも5月のことだったのですが、昨日見本誌が届きました!

正直、中国語は読めません。
でも、こうやって国外の人にも活動を知ってもらえる機会をいただけると言うのは本当にありがたいですね。
オーム社、ならびに担当さんには本当に感謝です!
金曜土曜と仕事で東京に出張していたのですが、帰ってきてG-ROBOTSをオーバーホールしました。
交換パーツは腰と腕。サーボの反対軸が折れました。
もう4年以上稼働して大会にも相当出場しているのですが、その間壊れたサーボは1つだけ。
本当にコストパフォーマンスに優れたロボットだと思います。
そんなG-ROBOTSを使って作ったExcelWalkerと、G-ROBOTSをHPIから頂くきっかけとなったKUMACOの作りかた、がいよいよロボコンマガジンに載りました。
改めて自分の記事を見てみると日本語の能力の無さを痛感しますが(^^;A
頑張って書いてみたので是非読んでみてください。
ちょっとだけ立ち読みも出来ます。
ちなみに天保山のJSRCの結果にも少しだけ名前が載ってるのですが、合わせてロボコンマガジン初デビューでした。
ROBOCON Magazine (ロボコンマガジン) 2012年 05月号 [雑誌]
オーム社 2012-04-14
売り上げランキング :
Amazonで詳しく見る by G-Tools
第12回のROBO-ONEのHPI賞で頂いたG-ROBOTS、一方的にすごく感謝してるんですが、少しはHPIさんに貢献できましたかねー。
Amazonにリンクが出来ていたのでご紹介。
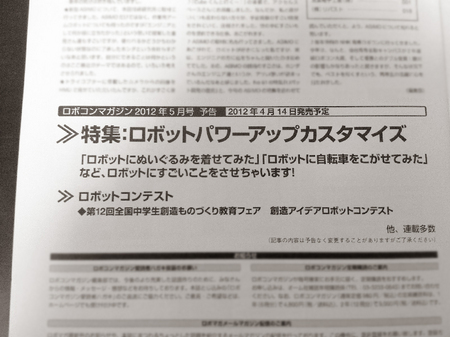
3月号のロボコンマガジンの予告をご覧になった方はお気づきかも知れませんが、5月号に「ぬいぐるみロボット」の記事を書かせていただきました!
いつもは、新しい衣装を作ったら真っ先にブログで紹介するのですが、今までウェディングの衣装をブログで触れなかったのは、この仕込みをやっていたからです!
というわけで、ぬいぐるみロボット、およびぬいぐるみの衣装の作り方をロボコンマガジンで大公開!
そして、同じ号で、Excel Walkerの記事も書かせていただきました。
正直、初めての雑誌記事の執筆で、いろいろテンパってました(笑)
とにかく頑張って書きました。
ロボットの設計より悩んだ気がします(爆)
5月号は4/14発売です!
(発売日に書店にGO!)
ROBOCON Magazine (ロボコンマガジン) 2012年 05月号 [雑誌]
オーム社 2012-04-14
売り上げランキング :
Amazonで詳しく見る by G-Tools
卒論で疲れて、遊びでKUMACOの中の人を描いてみたww
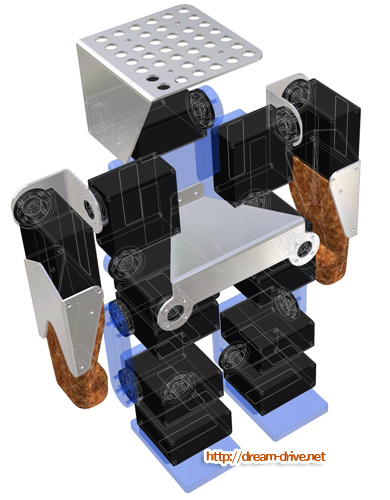
暇つぶしに遊びでCADってあたり末期症状かなぁ。
KUMACOの設計は実は初期の案だけCADで描いて、あとは現物あわせだったので、やっと現物にCADが追いついたというか・・・。
これで大量生産できる!(ぇ
ロボゴングが近づいてきたので、KUMACOの調整を始めたのだが、前からの起き上がりはいいとして、後ろからの起き上がりに「勢い」という不確定要素を用いるため成功率が低いのに頭を抱えています(汗
さて、ROBO-ONEも視野に入れてモーションを作る必要があるのですが、シナリオを用いたモーションはKUMACOには「挨拶」の1つだけしか入ってません。
ポジションキャプチャや、モーションエディタまで作りこんではみたものの、KUMACOのマスタースレーブの使い勝手が良すぎてまったくモーションを作っていませんでした。
でも、ROBO-ONEの資格審査と予選デモストレーションはそうは行きません。
完全なスタンドアロンを要求されます。
とはいえ、審査のためだけに歩行や旋回を作るのも時間の無駄のような気がします。
それで、ずっと悩んでいたのですが、今日解決方法を思いつきました!
それは「マスタースレーブ記録機能」
あらかじめ、マスタースレーブで予選デモを行い、そのときのコントローラーの値を保存し、サーボの値ではなくマスタースレーブのコントローラーの値を再生してやろうというもの。
KUMACOはアナログのスティック2本のXY軸で、1軸につき1バイトです。
というわけで1フレーム4バイト(4軸分)の情報量が必要になり1秒間に30フレームのレートとして、デモの2分間に換算すると合計3,600フレーム。
合計14.4KBの情報量が必要になります。
これならRAMにいっぺんに展開しても問題なさそうですね。
ついでに4つのアナログ情報で13個のサーボを動かすので圧縮にもなって一石二鳥♪
あー、でもこれやるならSDカードにアクセスしたいな!
SDカードについて勉強しないと^^;
Hitecのサーボのキャプチャが出来るようになったので、KUMACOのモーションをさっそく作ってみたのだが、無機質な感じというか、角速度一定のモーションはすごく温かみのないモーションが出来てしまった。
これがそのモーション。
そこで、過去にロボビーMSを動かしたとき作ったモーションの角速度を三角関数(sin関数)で補正するモーションを使用してみた。
角速度一定のモーション(上)
三角関数(sin関数)で補正をかけたモーション(上)
わかりにくいが多少下のほうが速度が変化しているのがわかる、あと乱数を用いたり、プログラム的にも「カワイイ」ロボットに仕上げていこうと思う。
(ちょっと不気味でアレなんで、KUMACOのブログじゃなくてこっちにアップしちゃいました;;)
Hitecサーボのキャプチャについて、第11回ROBO-ONEのときにハイテックに直接聞いて、「HITEC Multi-protocol Interface」はまだ一般に公開されていないって感じの答えだったのですが・・・。
ロボザックのHSR-8498HBを使用しているKUMACOで、いい加減キャプチャでモーションを作りたかったので、英語の資料を読みながら、やってみたら意外と普通にできました。
ちなみに資料(PDF)は、こちら。
HIDEロボさんのとこの記事にHITして偶然みつけることができました。(ありがとうございます。)
だいたいの仕様はKONDOのサーボと同じで特に難しそうなところもなかったので組んでみました。
ちなみにオープンコレクタだろうと当たりをつけて、サーボの信号線を4.7kΩで3.3Vにプルアップして接続しました。

ソースは平野さんのインターフェース基盤の記事の、KONDOサーボ用のサブルーチンを改造して使用させていただきました。
KONDOの教示機能と同じく、50μsの信号を送った後、サーボからパルスが帰ってきますが、パルスが帰ってくるタイミングが、KONDOと違うようで、幅を大きく取って拾っています。
今、オシロスコープがないので確実な時間は分からないのですが、若干KONDOよりレスポンスが早いようです。
この後プログラム的に絞っていっていい感じの値を見つけられたらいいなと思ってます。
ちなみに、実行している動画。
左のサーボでキャプチャして、右のサーボに反映するようにしています。
KUMACOが完成しました。
モーション作りをしています。
でも、いろいろ問題を抱えてて、ROBO-ONE本戦は無理そうです。
とりあえず、サーボ2個目死亡。
1方向にしかトルクが発生しない。内部の回路は分からんがHブリッジの片側が死亡したときの感じ。
PS:
KONDO -> Bestech -> Hitech
と各社のローコスト価格帯のサーボを使ってきて・・・。
いろいろ問題点はあったけど。
一番良かったのはAX-12だったなぁ。と今更ながら思った。
インベンターで、サクっと図面引きました。
ヌイグルミに仕込むんで、パーツ数はかなり少ないです。
そして、軽く作るんで、サーボは片支持で行こうかと。
新機体KUMACOは共同制作なんで、ブログを新設しました。
KUMACO関連はこっちに掲載していきます。
不安要素
SH2で作るとサイズ的に問題が出てくる気が・・・。
起き上がりは出来るのだろうか・・・。
ベースはこれに決定。
せにゃならんこと。
ぬいぐるみは彼女に作ってもらうことにしました。
とりあえず、アクリルベースで軽く行きます。
マイコンはSH2で、プログラムは今までのツギハギ。
これで、ギリギリってところかな。

宣言どおり買っちゃいました!
とりあえず倉敷のショッピングモール行ったついでに店に置いてあった5つ全部ww
しかもデート中に買ってしまいましたよ。(ォィ
彼女ももう慣れたみたいで、特に突っ込まれることもなくスルーされました(いいのか・・・
しかし、コレ。
ホーンはついてないし、ケースのカバーもない。
まぁ、ケースのカバーはどうにでもなりますが、HSR-8498HB用ホーンはどこかで売ってるんでしょうか・・・。
ツクモ見ても載ってないなぁ・・・。
http://www.de-club.net/rbz/これはROBONOVAじゃないの〜?っと、ツッコミ入れたくなる「RZ-1」。 もしかして、RZ-1ってロボノバの型番なのかな〜と思って、検索してみても日産のRZ-1しか出てこない。 いちおうオリジナルなんですね。 素人目に見て、KHRの方がシェアは大きいように見えてたんですが、ディアゴスティーニと提携するとはやるな、ハイテックって感じですw
そこで、あることに気がついた。
ディアゴスティーニってパーツが小出しにやってくるアレですよね?
当然、ロボットなんだからサーボも付いてくるわけで、・・・
「サーボの付いてる号だけ買えばいいんじゃね?」
http://www.de-club.net/rbz/parts.php
どうも、第3号がソレに当たるっぽい。
こんな事言ってたら賛否両論あるでしょうが・・・。
ハイテックのサーボが1980円で手に入る!!
これは結構大きいのではないでしょうか?
「第三号 2007年1月30日発売」らしいんで、これは書店でのバトルが予想されますね。
個人的にはSH2/7144が付いてたインターフェース並に期待してるんですが・・・。
とはいえ、中途半端な性能なんで普通にバトルメインの人にはあんまり利点ないか〜。
あと第3号だけだとホーンが付いてないので、その辺は買い足す必要がありそう;
あと、サーボについて何も書いてないんで、このロボットがロボノバではない以上、当然サーボもロボノバ用のHSR8498HBでない可能性もありますね。
写真からハイテックであることは確実なのですが・・・。
そこだけが気になります。どうなんだろうなぁ。
どうせ、第5号、9号にもサーボは付いてくるので、様子を見て、サーボの型番を確認するのもアリかもしれませんね。
AX-12の次はこれかな〜。
まぁ、バトルで「勝てる」ロボが作れるとは思いませんが、コストパフォーマンス的には充分ですね。
でも、20個で4万・・・。
ううーーーむ。その4万がキツイ;;どうしよう・・・。
PS3と比べてしまうorz









![ROBOCON Magazine (ロボコンマガジン) 2012年 05月号 [雑誌]](http://images-jp.amazon.com/images/P/B007RFHKK4.09.MZZZZZZZ.jpg)

最近のコメント