
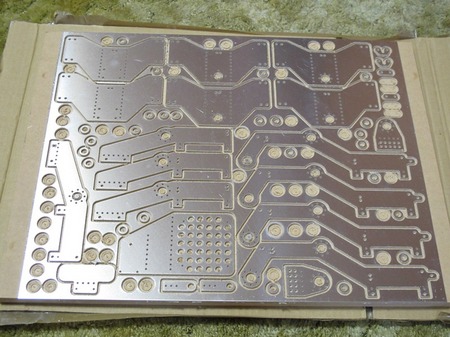
さっそく折り曲げしました。
ポケットベンダーすごく便利です!

こんな「コの字曲げ」も楽勝!

寸法もぴったり!

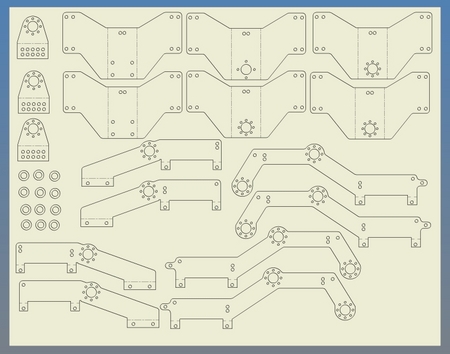
折り曲げない小さな部品もサイズ確認。
(これが1つなくなりましたorz)

全パーツ折り曲げ完了!
全部ポケットベンダーで曲げられました。

ホーザンの曲げ機を買おうかと考えていたことが過去にありましたが、全然これで十分です。
もっと大きいパーツは会社の万力がありますし、でもこの便利さならそれも登場する機会はなさそうです!
良い買い物でした♪
次はヤスリがけをする予定。
その後、アルマイトにするか、ピカールで磨き上げるか悩み中。





















最近のコメント