
先ほど投稿した、「田舎でフライト」は、実は前フリなのですが
メインはこちらで、安物ではありますがせっかく買ったトイカメラなので、もう少し詳しく検証しようかと思います。

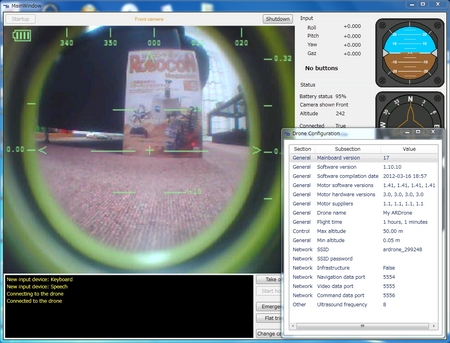
もとの解像度は1280×960ピクセル。
HD画質なのですが、縦横比は4:3ということで、動画用というよりは静止画を意識した設定ですね。
ただ、最終的にぼやけた感じになるので、有効解像度はSD画質程度という感じでしょうか。
昔のトイカメラが、30万画素と謳いながら実際は10万画素程度、って感じだったのとよく似てますね。
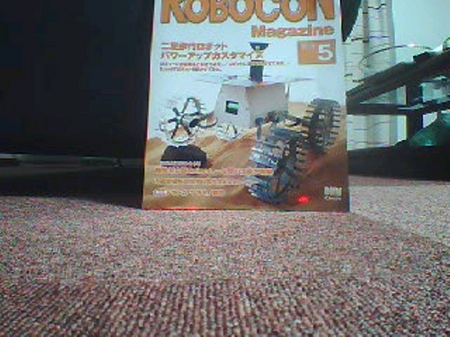
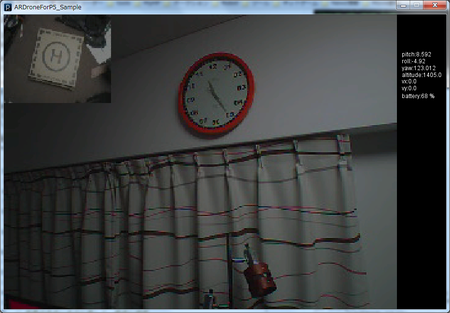
色に関しては全体にちょっとピンクを足したような感じで、彩度は強め。
ちょっと気持ち悪い色になってますが、色彩補正をかければ結構修正できそうな気がします。
ただ、致命的なのはブレた時にゆらぎが出る点ですね。
iPhone4を載せて飛ばしたときはブレで滲んでましたが、このカメラはブレると画面が揺らぎます。
まさに、「これこそ、ローリングシャッター方式!!」といった感じです。
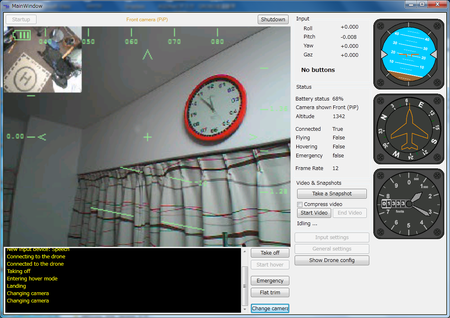
…さて、というわけで、揺らぎはどうすることもできませんが、前述の色の部分をもう少し弄って、見られる動画を作成してみました。
Before
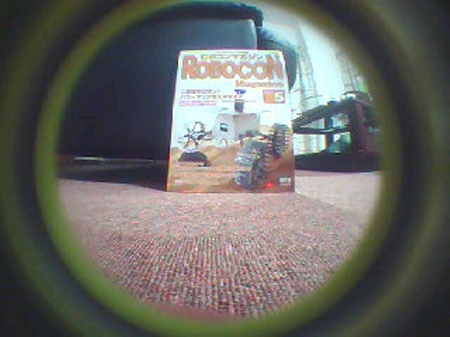
After
結構違いますよね。
草や道路の色などオリジナルに近づいていると思います。
色の違いによる気持ち悪さはかなり軽減されています。
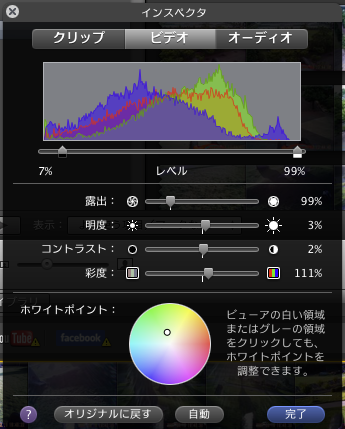
設定はこんな感じで、やはり色彩をメインで弄っています。
というわけで、安物トイカメラの検証でした。




























最近のコメント