
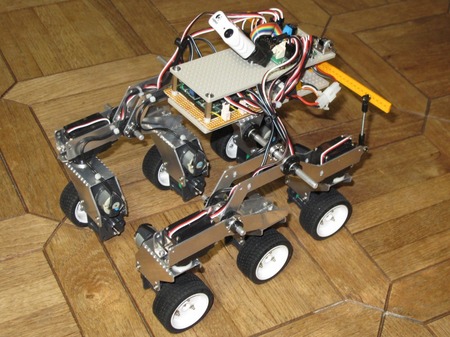
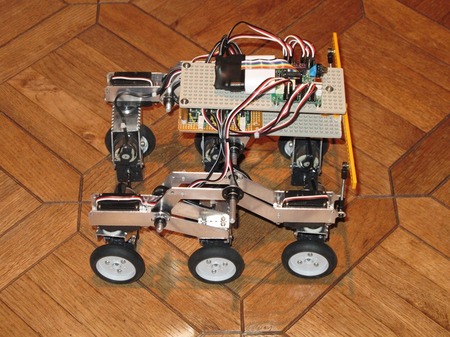
‹vپX‚ةDreamPathFinder‚جگ»چى‚إ‚·پB
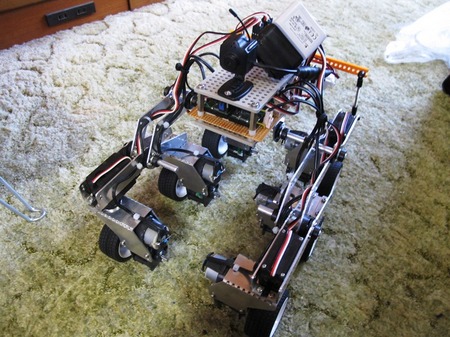
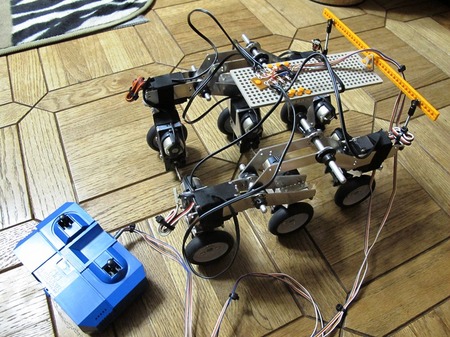
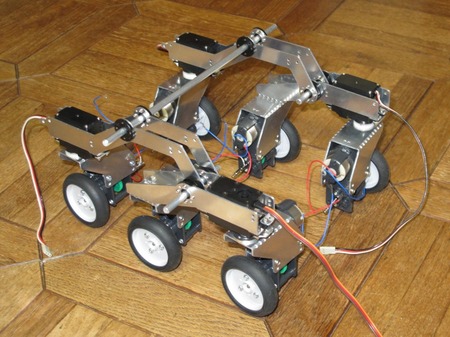
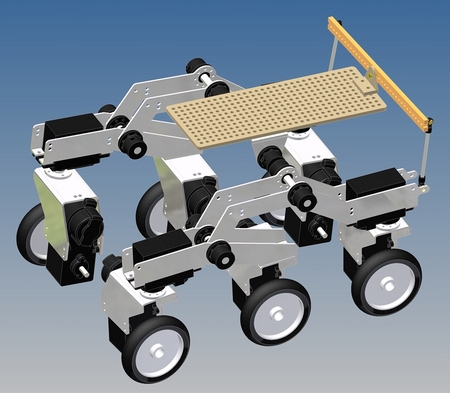
8Œژ6“ْ‚جRCIV‚ةŒü‚¯‚ؤƒJƒپƒ‰‚ج“®چىƒeƒXƒg‚ًچs‚¢‚ـ‚µ‚½پB
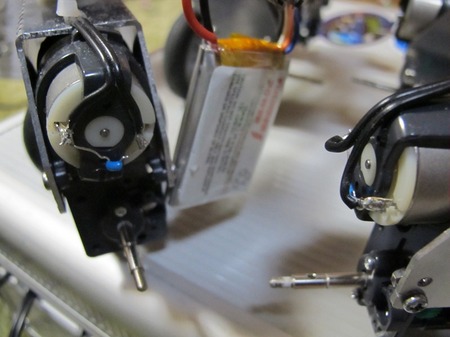
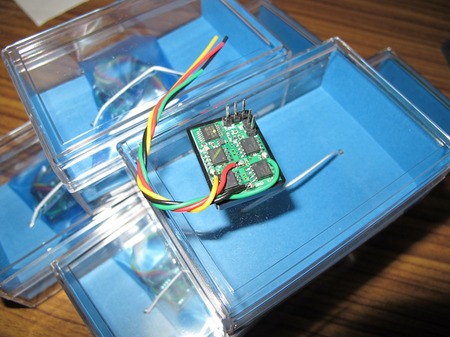
‚ئ‚è‚ ‚¦‚¸ƒJƒپƒ‰‚جژو‚è‚آ‚¯پB
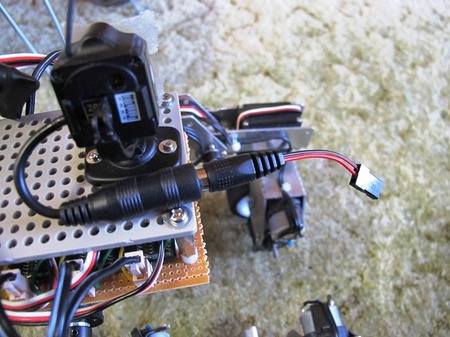
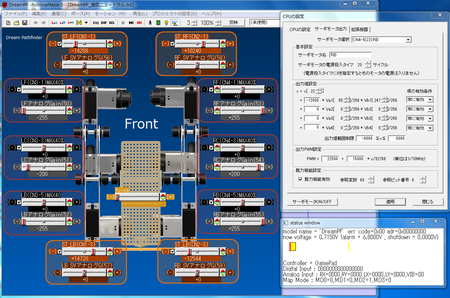
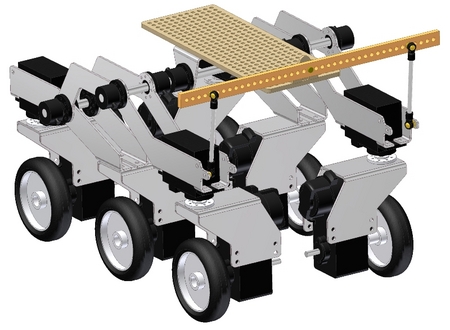
ƒJƒپƒ‰‚ج“dŒ¹‚حƒTپ[ƒ{ƒRƒlƒNƒ^‚جژd—l‚ة‚µ‚ؤپACPUƒ{پ[ƒh‚©‚ç“dŒ¹‹ں‹‹‚إ‚«‚é‚و‚¤‚ة‚µ‚ـ‚µ‚½پB
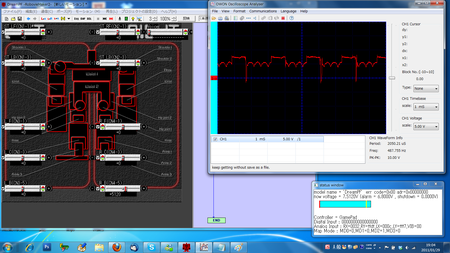
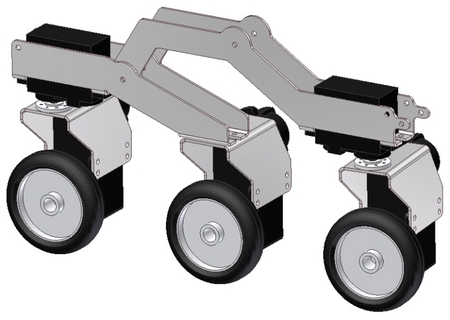
‘€ڈc—p‚جƒVƒXƒeƒ€‚حپA’nƒfƒW”ٌ‘خ‰‚إژg‚ي‚ب‚‚ب‚ء‚½‰tڈ»ƒeƒŒƒr‚ئ–³گüƒJƒپƒ‰ژَگM‹@پAƒچƒWƒNپ[ƒ‹ژَگMƒRƒ“ƒgƒچپ[ƒ‰پ[پB
‚±‚جƒVƒXƒeƒ€‚إ10m‚‚ç‚¢‚حƒJƒoپ[‚إ‚«‚ـ‚·پB

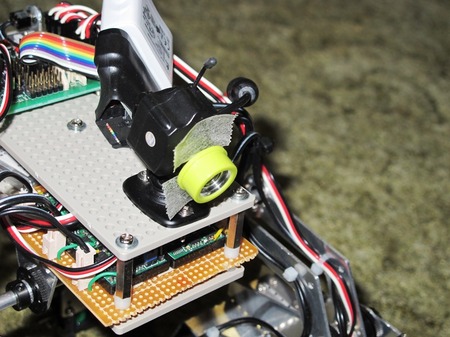
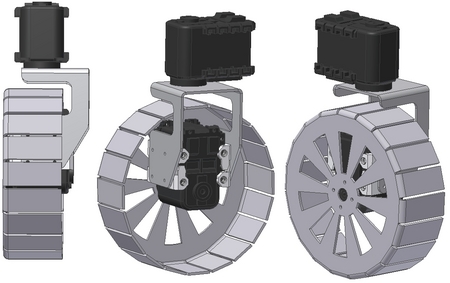
Œg‘ر—p‚ج‹›ٹلƒŒƒ“ƒY‚حژطژ~‚كپB
‘هŒF‚³‚ٌ‚©‚ç—]‚ء‚½ƒŒƒ“ƒY‚ً’¸‚«‚ـ‚µ‚½پB‘هŒF‚³‚ٌ‚ج‹Lژ–‚إکc‚ف‚ھŒ‹چ\‚ ‚é‚炵‚¢‚ج‚إ‚·‚ھپA‚ا‚ê‚‚ç‚¢ژg‚¦‚é‚à‚ج‚©پA‚±‚ê‚àژہŒ±‚µ‚½‚¢‚ئژv‚¢‚ـ‚·پB
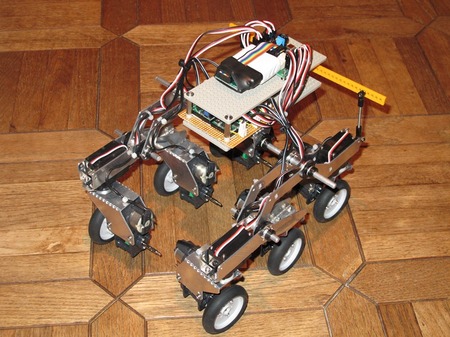
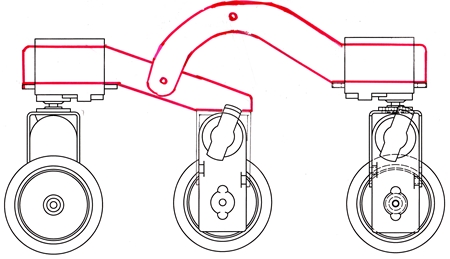
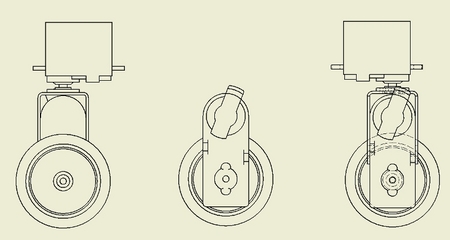
‚ئ‚¢‚¤‚ي‚¯‚إپAˆب‰؛‚جژتگ^‚Q–‡‚ھƒŒƒ“ƒY‚ج—L–³‚ج”نٹr‰و‘œپB


‚©‚ب‚èچLٹp‚ة‚ب‚è‚ـ‚·پB
ٹm‚©‚ة’[‚ج•û‚ةکc‚ف‚ح‚ ‚è‚ـ‚·‚ھپA‘€ڈc‚·‚é‚ة‚ح‚±‚؟‚ç‚ج•û‚ھ‚©‚ب‚èŒّ‰ت‚ ‚è‚ـ‚·پB
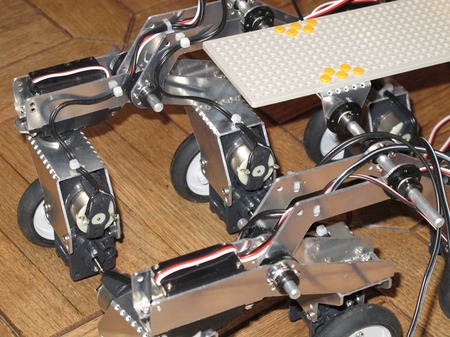
–â‘è“_‚ئ‚µ‚ؤ‚حپAƒTپ[ƒ{‚⃂پ[ƒ^پ[‚جƒmƒCƒY‚ھƒJƒپƒ‰‚ةڈو‚é“_پB“dŒ¹‚ح•ت‚ج•û‚ھ—ا‚³‚»‚¤‚إ‚·پB
‚ ‚ئƒJƒپƒ‰‚ئƒRƒ“ƒgƒچپ[ƒ‰پ[‚ھ‚ا‚؟‚ç‚à2.4GHz‚ب‚ج‚إ‚·‚ھپAٹ±ڈآ‚ج‰e‹؟‚حچ،‚ج‚ئ‚±‚ë‚ ‚è‚ـ‚¹‚ٌپB
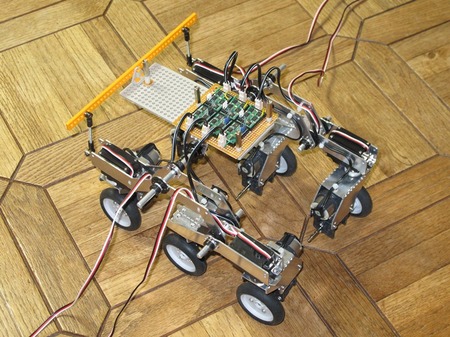
Œم‚جƒeƒXƒg‚إ‚©‚ب‚èٹ±ڈآ‚µ‚ؤ‚¢‚邱‚ئ‚ھ•ھ‚©‚è‚ـ‚µ‚½پB
ƒJƒپƒ‰‚ج•û‚ج“d”g‚ھ‹‚¢‚ج‚©پA‰f‘œ‚ة‚ح‰e‹؟‚ ‚è‚ـ‚¹‚ٌ‚ھپAƒRƒ“ƒgƒچپ[ƒ‰پ[‚ج•û‚ھƒ_ƒپپ[ƒW‚ًژَ‚¯‚ؤ‚¢‚é‚و‚¤‚إگ§Œن‚ھŒّ‚«‚ـ‚¹‚ٌپB
‚±‚ê‚إ‚حپA‘¼‚جƒچƒ{ƒbƒg‚جƒچƒWƒNپ[ƒ‹ƒRƒ“ƒgƒچپ[ƒ‰پ[‚ة‚à‰e‹؟‚ھڈo‚ـ‚·‚ثپB
–³گüLANƒVƒXƒeƒ€‚ة•دچX‚·‚é•K—v‚ھ‚ ‚è‚»‚¤‚إ‚·پB
































چإ‹ك‚جƒRƒپƒ“ƒg