台湾版のロボコンマガジンの見本誌が、オーム社より届きました。
5月号に掲載したネタを、翻訳して台湾版に載せていただけるということで、お話をいただいたのも5月のことだったのですが、昨日見本誌が届きました!

正直、中国語は読めません。
でも、こうやって国外の人にも活動を知ってもらえる機会をいただけると言うのは本当にありがたいですね。
オーム社、ならびに担当さんには本当に感謝です!

台湾版のロボコンマガジンの見本誌が、オーム社より届きました。
5月号に掲載したネタを、翻訳して台湾版に載せていただけるということで、お話をいただいたのも5月のことだったのですが、昨日見本誌が届きました!
正直、中国語は読めません。
でも、こうやって国外の人にも活動を知ってもらえる機会をいただけると言うのは本当にありがたいですね。
オーム社、ならびに担当さんには本当に感謝です!
Amazonにリンクが出来ていたのでご紹介。
3月号のロボコンマガジンの予告をご覧になった方はお気づきかも知れませんが、5月号に「ぬいぐるみロボット」の記事を書かせていただきました!
いつもは、新しい衣装を作ったら真っ先にブログで紹介するのですが、今までウェディングの衣装をブログで触れなかったのは、この仕込みをやっていたからです!
というわけで、ぬいぐるみロボット、およびぬいぐるみの衣装の作り方をロボコンマガジンで大公開!
そして、同じ号で、Excel Walkerの記事も書かせていただきました。
正直、初めての雑誌記事の執筆で、いろいろテンパってました(笑)
とにかく頑張って書きました。
ロボットの設計より悩んだ気がします(爆)
5月号は4/14発売です!
(発売日に書店にGO!)
ROBOCON Magazine (ロボコンマガジン) 2012年 05月号 [雑誌]
オーム社 2012-04-14
売り上げランキング :
Amazonで詳しく見る by G-Tools
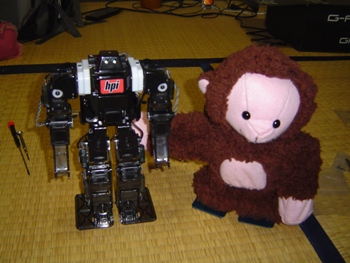
先週末、2012/2/11(土)に結婚式&披露宴を行いました!
ウェルカムドールはKUMACOとSARUBOのウェディングバージョン!
ある意味、製作期間は5か年!
動くウェルカムドールに、披露宴のゲスト以外の人もたくさん集まってくれました(笑)
そしてウェルカムボードは新婦の友人が描いてくれました。

ウェディングケーキはてっぺんに新郎新婦がいるのですが、神父が”ドラえもん”なのでした(笑)

二次会で、大学時代の友人たくさんからの寄せ書きのブタちゃんを頂きました。

その他多数、祝辞・祝電・プレゼントを頂きました!
本当にありがとうございます。
四国ヒューマノイド研究会の中川さん&山本さんより、ほむらちゃん(@まどマギ)のコスプレを頂いた時にはどうしようかとww
さてさて、7年間付き合ってゴールインしました。
大学での出会いでしたので、大学の共通の友人はもちろんの事、2007年以降はKUMACOのあれこれで、ロボット方面でもいろいろ一緒に活動してきました。
この数日、たくさんの方からお祝いの言葉を頂いて、この7年、本当にたくさんの人に応援されたなぁ…と、あらためて実感しました。
みなさん、本当にありがとうございます!
この幸せは、たくさんの皆さんから頂いたものに間違いありません。
これからもご指導のほど、よろしくお願いします!!
以上、簡単ではありますが、結婚報告でした。
ちょっと掲載が遅くなってしまって申し訳ないのですが、
11/3に行われた草加商工会議所まつり(埼玉県:綾瀬川左岸広場)内で、Kinopyというロボットが盗難にあいました。

未だ発見されていないようです。
製作者の小田さんには過去のROBO-ONEではキノピーとKUMACOのツーショットを撮らせていただいたこともありましたが、やはりご自身のロボットをとても愛されている方だと思います。
同じキャラクターロボットの製作者としては心中を考えるといたたまれません。
いち早く小田さんのもとにKinopyが帰ってくることを祈るとともに、もしウチの日記を見られているロボット関連の方以外でもどこかで見かけることがあったら教えてください。
続報はこちらでチェックできます。 二足歩行ロボット「Kinopy」盗難事件続報
昨日は、1日秋葉原をグルグル回ってました。
チキチキロボマッチも昨日開催されていたらしいので、ちょっと気にはなったのですが、なかなか会えないジャンルの違う友人が何人かいて、それぞれと秋葉原を周遊しました。3週くらい?(笑)
必要なものもあったのでいろいろ買い物しました。
ロボット関係はこんな感じ。
Gロボの保守部品とVstoneのVS-RC003のI/O拡張ボードとソーラーLEDライト。

I/O拡張ボードは、サバゲ用。
これで、地磁気センサーと発射回路・被弾センサーをVS-RC003から制御できます!
ソーラーは部品取り用で、これもサバゲ用。
あと、ジョイスティックを購入。

これはGロボの逆運動学Excelとサバゲの両方に使えるかなと。
ジョイスティックからVS-RC003用のシリアル生成PGを書けば、サバゲに使える予定です。
1万円弱くらいの覚悟してたんで、3,000円代で買えてラッキーでした。
いろいろ探して回ったのですが、ツクモもソフマップもジョイスティックの取扱いをやめたらしく、アークを回ってやっと発見できました。
PC関連だとハードディスクが3TBで1万円切ってたのも驚きでした。
ちょっと欲しいなと思ったのですが、とりあえずハードディスクは見送り。
あと、書籍いろいろ。
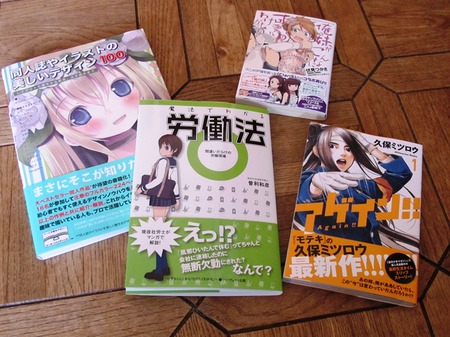
モテキが個人的にアタリだったんで、久保ミツロウさんの「アゲイン」(AA)を買ってみました。
「あの時、俺がああしていたら、この"今"は変わっていたんだろうか?」なんていう、オビのポップもググっと来ましたw
あと、「同人誌やイラストの美しいデザイン100」(AA)発売当初から気になっていたのですが、結構勉強になりそう。
同人誌は描きませんが、ロボットのイラストを作るときにデザインで参考にしようかなと。
特に意味はありませんが、秋葉原or日本橋で買い物をした時の通例の買い物報告でしたw
仕事の関係でSF大会1日目は無念のリタイアで、懇親会から参加します。
参加予定だった「チロルチョコロボット大会6 in ホビーロボットコロッセオ」も残念ながら参加できなくなりました。
残念がっている所、まさゆきさんからツイッター経由で「宿でやりますか?w」と言っていただけたので、どうなるかわかりませんが、とりあえずロボットをチロルチョコロボット大会仕様にして持っていきます!
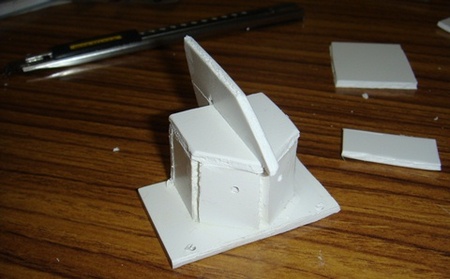
というわけで、ビッグチロルの帽子を作ってみました。
まず、ダイソーで材料調達
チロルチョコの包み紙をスキャナで取り込みビッグチロルの型にはめ込みます。
「外装原紙.pdf」はこちらからダウンロードしました。
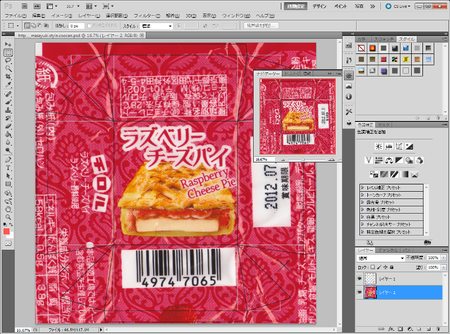
これをシール用シート(A4)にインクジェットで印刷した後、厚紙(B4)にベタっと貼り付けます。
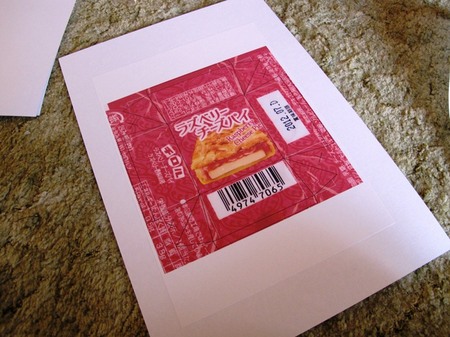
外装原紙のガイドラインに従ってカッターでカットします。

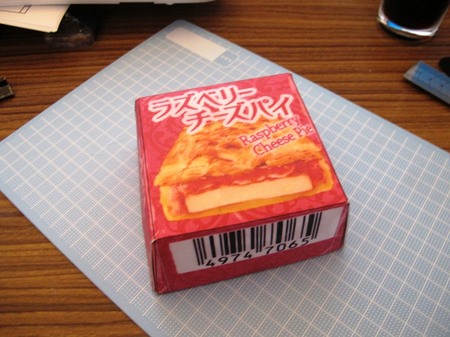
組み立てます。
組み立ては、すべてホッチキスで行いました。
個人的に、汚れたりするのであまり糊とかボンドって好きじゃないんですよね。
顎にひっかけるための帽子のゴム紐を取りつけます。
これもホッチキスで止めました。
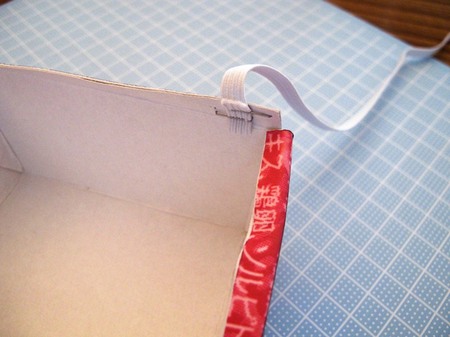
というわけで完成!

こんな感じでよろしいのでしょうか?>まさゆきさん
現在、8/6のロボカントリーIVに向けてフライヤー製作中なのですが、NAKAYANさんよりイラストを提供していただきました。
その中で、今回KUMACOのイラストを新規に描いていただけることになり、本日いただきました!!
可愛いです!
NAKAYANさんありがとうございます。
イラストの方は、フライヤーとポスターに掲載される予定です。
ちなみにこのイラストのスカートを実際に再現する方向で、カントリーIVに向けてKUMACO準備中です。
ゴールデンウィークもそろそろ折り返し地点というところでしょうか。
自分はカレンダー通りの休日なので間に仕事を挟むのですが、今日は家でまったりしつつDIYの1日です。
まずは設置が義務化された火災報知器を取り付け。
つぎに購入したEOS 0403i DCをACアダプターと接続してコンパクトに持ち運べる用改造。
(電源内臓より電源別売の充電器の方が断然安く手に入ります)
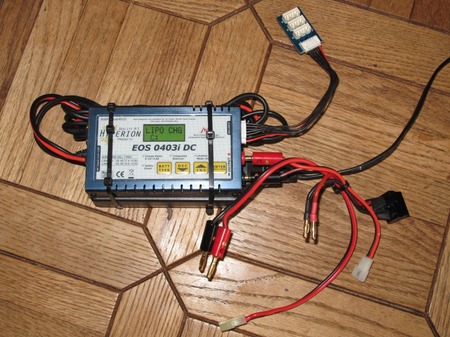
サンダーパワーのLi-Poバッテリーのバランサコネクタは、ハイペリオン仕様に変更しました。
とはいえ、さすがに3C充電はしない方が良いみたい。

あと、以前もらい物で放置していた430MHz帯 パワーアンプキット SFK-430(スワロー誘電(株)製)
プリント基板のキットになっているのですが、ずっと組み立てないまま放置していたので、組み立てました。
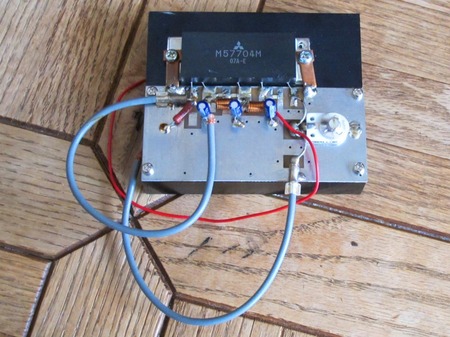
アンテナと無線機の間に入れると、1Wの出力を15Wの出力に増幅してくれる代物です。
ただパワー計を持っていないので、最後の微調整が出来てません。
局免許を5Wで申請してたと思うんだけど、その場合使ったら違法よなー。(^^;
ってことで、最近は無線自体使うことがないんで、緊急用ってことで置いておきますw
今からは・・・、ロボットかホームページ周りで何かしよう・・・。

「2006年 Interface 6月号」「週間ROBOZAK3号・6号」に引き続き、ディアゴスティーニのサーボ付属号のまとめ買いをしました!
合計22冊行きました!!ヽ(゚∀゚ )ノ
ただROBOXEROは、ロボットユーザーの裾野を広げる役割を担うロボットでもあるので、特定店舗の店頭在庫にダメージを与えないよう、あらかじめ予約をして地元チェーン書店の卸の倉庫の段階で押さえてもらいました。
一応、一般的な買い方ではないので、多少の配慮はしたつもりです。
思い出せば、ROBOZAKを大量に買って作ったKUMACOで第11回ROBO-ONEに出場し、そこで出会い感動した双葉のコマンドサーボがこうやって4年の進化を経てまたディアゴスティーニのROBOXEROに付属。
それを再び大量買いをしている訳です。
これはまた新しい発想のロボットを作るしかないですね!!
ちなみに大量にゲットした本誌に関しては、今月高松であるイベントで、参加者に無料配布しようかなと考えています。
電池ボックスもKHRS主催の工作教室で有効活用出来たらいいなと思います。
さて、注意書きですが、この日記は決してROBOXEROを定期購読せずに、サーボの号だけ買うことを推奨しているわけではありません。
当然メーカーの保証が受けられる使い方はできませんので、全て自己責任です。
ROBOXEROは、全て購読しても充分お得なロボットですので、初心者の方には間違いなくそちらをお勧めします。
今日は1日、先週の高知のROBO COUNTRY IVでボロボロになったロボットの修復をしています。
KUMACOの修復に関してはKUMACOブログの方で。
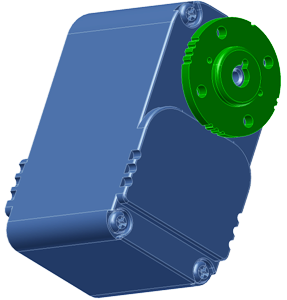
G-ROBOTSの方は、バトルの直後腰が動かず、しばらくして煙を吹いたのですが、分解してみると腰の部分のRS301CRのFETが燃えていました。
サーボの安全機構をキャンセルして使っていたので自己責任ですね。
ただ、腰のサーボがなくても起き上れるし、設計的にも結構腰のサーボに負担がかかる形にはなっていたので、この際これからのことも考えて腰のサーボそのものをなくしてしまおうかと思います。
さて、どうやって固定するか。
そして、固定したらどうやってバッテリーを交換しようか。
しばらく考えてみよう。
メーカー様よりブラケットのデータいただきました。
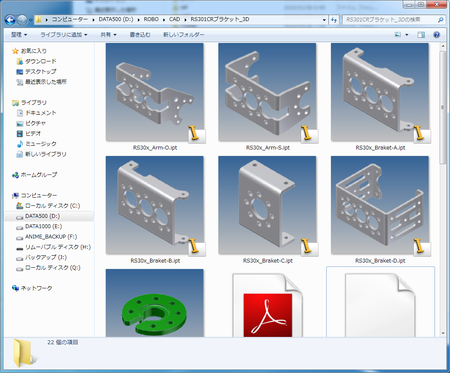
さっそく、使えるデータに変換です。
あと、RS-301CRの連続回転は、コマンドそのものがないことが分かりました。
中村博士がKONDOサーボを連続回転仕様に改造していたのと同様な改造が必要だそうです。
改造方法に関してはUE村さんに教えていただいたのですが、不可逆な改造なので、悩みどころです。
G-ROBOTS自体、BusterGで行くのか、新しいミニKUMACOを設計するのか・・・
どちらも構想は進んでいるのですが、両方選べないところが、残念なところです。
サーボを買い足すのは・・・そこまで懐事情が芳しくありませんww
そんなわけで、秋のRCIVまでにはFUTABAサーボで、完全な形で新型を作りたいと思います。
ロボファイト、エントリー時に画像を登録していなかったので、いまさらながら登録してみました。

全体はまだ未公開ですが、大体わかりますねw
これで、ハンドのモーターが回転すれば面白いアクションが出来るのですが・・・
・・・今回は飾りですw
昨日、仕事で飲みすぎて眠いみっちーです。
週末がロボファイトなのにまだ外装制作してます♪(滝汗
プログラムは移動のフェリーの中だろうか・・・。
今週前半は頑張ってヘッドパーツを作ってみたので、写真のみのダイジェストで振り返ります。





かっこいいのか?と聞かれると、微妙ですね(・・;A
ちなみにベースの材質は低発泡塩ビです。
パテはタミヤのベーシックパテですが、肉やせして大変でした。
時間のないときは光硬化パテにすべきでした。(反省
全体的にかなり軽く作れたのは良かったかな。
もっと時間があれば、表面をもっとキレイにしたかったです。
ロボファイト11のSRCエントリーしました。
・・・というわけで、とりあえず材料を買ってきました。

「来週なのに、まだ材料って・・・」という、絶望的な状況です。
仕事を言い訳にするのもなんですが、とりあえず、参加してみんなに会いたいなーという感じでしょうか。
今回は中川デンキさんと一緒に乗り合わせで行きます。
今週もなかなか時間が取れませんが、できる限りは頑張りたいと思うので、久々の大阪遠征ですが、よろしくお願いします!!
大会の必需品として、バッテリーの充電器はかかせないが、バッテリーの充電器の電源としていつもアルインコの電源を持って行く。
この電源、モーション作成など大電流を垂れ流すにはちょうどいいのだが、充電用の電源としては少し大きい。
そこで、大会用に充電器を小型化することにした。
ちなみに今回のRCIVでsakiaさんと、だうとさんからアドバイスいただきました。
用意するのはコレ。

東芝のノートPC用のACアダプタです。
15V 5AとパーフェクトなスペックのACアダプタが、PCデポのジャンクコーナーに1,000円で落ちてましたw
15V 5Aならハイペリオンの4C充電にも耐えられますね。
というわけで、ACアダプタにコネクタを付けて従来のケーブルとも取り換えられるように改造しました。
ACアダプタ本体は充電機本体と結束バンドで固定しています。

充電も良好。
あとは、バランサーがあれば念願の4C充電を小型化した充電器で行えますね。
そうなれば、現地でモーションを作る際も、大きな電源を持ち歩くことなく、バッテリーの予備本数も気にせずモーションが作れますね。
これはすごく便利でオススメです!
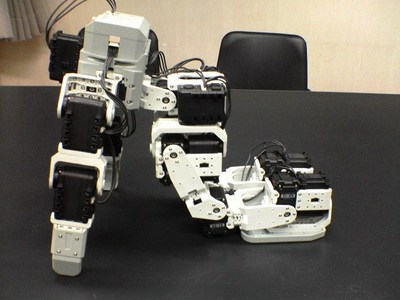
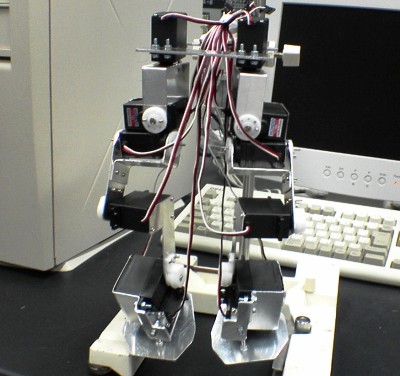
今週末がRoboCountryIVということで、今日はロボット漬けの1日にしました。
まず、今回久々エントリーのSARUBOですが(かなり昔のロボゴング以来?)、そのままというのも能がないので、マスタースレーブ化してみました。
JinさんのJX-Systemに、昔使っていたKUMACOの制御基板を載せた形になっています。
KUMACOの古いコードなので、いろいろ記憶をたどるのが大変でしたが、なんとか換装できました。

(結局JX-Systemが発売したのか分からないので、モザイクを入れております)
なんとなく動画も作ってみました。
移動用のジュラルミン(?)ケースですが、KUMACOと一緒にセットできました(笑

G-ROBOTSの方は頭をパテで整形してます。
どんなロボットになるかはお楽しみ。

プログラムは逆運動学のプログラムを書く予定だったのですが、さすがに時間切れで、今回はノーマルモーションだけの可能性大です。
まぁ、これからG-ROBOTに注力していこうとは思ってるんで、長い目で見てください。
それで、当日5/2なんですが。
実は午前中に仕事が入ってしまいました。
大学時代のロボ研の友達に助っ人を頼んでるんで、ロボットは先に行ってますが、僕自身は午後からの参加になると思います。
関係者のみなさん、参加者のみなさん、よろしくお願いします。
来月はRCIVもあるので、必要なものを買いそろえてみた。

KUMACOとSARUBOを同時に動かすために追加の無線PS2コントローラ。
なかなか売っているお店がなかったのでヤフオクでゲット。
ただ、ちょっとガッカリなのは、ロジクールの純正のヤツと違ってこのFFモデルは使用しないときに電源が勝手に切れないらしい。
電池抜き忘れると電池がなくなるのは痛い誤算でした。

G−ROBOTSもなにか手を加えないと・・・ということでオプションのパーツを適当に買ってみた。
電池も1本ではバトルにならないので追加。

外装をとりあえず白に変えてみたのだが・・・。
なんかしっくり来ない。
やっぱり基本設計から自分で手を加えないとなー。
とりあえず、腰ピッチいらない。
欲しいのは腰ヨー軸なんだーーーー!
・・・いや、それ以前にこの白の外装。
ちぐはぐで、すごくマヌケなんですが;;;(笑
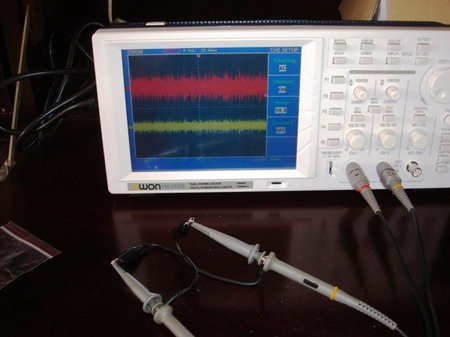
秋月で買った格安のオシロスコープ(PDS5022S)届きました。
箱のデザインがオサレ♪

とりあえず起動画面
なんといっても、画面がデカイ。
そこらのカーナビよりデカイ。
35,000円のクオリティじゃないよなーと。

基本の矩形波を取ってみました。
操作はすごく直感的。説明書いらんなぁと・・・。
とりあえず、前情報で画面の解像度の低さは聞いていましたが予想通りなので問題なし。

おまけでグランドを測ってみた。
1メモリ50mVでこんな感じ。
ノイズは多目。まぁTTLレベル測るには誤差だけどね。

友達からmixi経由で、CNCフライス盤を半額出すから買わないかとの申し出を貰った。
どうやらヤフオクで、組み立て済みの自作CNCのキットがあるとのこと。
http://page16.auctions.yahoo.co.jp/jp/auction/u21500921
モニター特価ということもあって、モニターが大変そうなんで、意外と安価で買えるかなとも思ったんだけど・・・
300mの加工機なんて10万でも安いと言えば安いんでもう少しついて行こうかとも思ったのだけど・・・
ステッピングが1/8だったり、ピッチが不明だったり、自作の基盤が見るからにショボそうだったり、とりあえず引き際を9万に設定して特攻。
9万まで上げて見たものの9万1千円で負けました。
残念。
10万超えるようならストロークでは半分くらいしか面積切れないけど、オリジナルマインドのmini-CNC BLACK 1520とかもいいかなーとも思うんですよね。
JinSatoさんの自作CNCを見せて貰ってから、自作するのも面白そうだなとも思うんですが・・・
製作時間が未知数なのとメンテナンスが測り切れないんで、イマイチ踏み出せず。
とりあえず、Vistonに10回切ってもらうのと、自分でCNC持つ場合のコストと、簡単さを考えみようかと。
Vistonの切削サービスはDXFさえ書き出せばGコードを見直さなくても切って貰えたり、エンドミルを折る心配をしなくていいのはすごく魅力なんですよね。あと、面積もかなり大きいし。
ヤフオクでまた組み立て済みが出品されないかな〜。
PS:
買えたら買えたで、モニターしながら卒論書けるのかっていう問題もあったのですが、そこは何も考えませんでした(笑
今日は秋葉原をうろうろ。
やっとロボットの記事を書けそう。
実ははじめて秋月に行ってきました。

マイコンにロジックICに、いろいろ普段、通販でお世話になっていますが実際に店舗に行くのは初めてでした。
さて、今回買ったもの・・・

・VS-RC003HV
買っちゃいました!!
KUMACOに搭載します!
これで今までモーションにかけてた時間を削りさらに可愛いKUMACOを演出できそうです。
ついでに、音声も出来て一石二鳥!

・Dynamixel用のコネクタ
正直、どこに売ってるのか分かってなかった。
たまたま、見つけてちょっと興奮。
これで、Dynamixelのサーボの回路を作るのが楽になります。

・静電気防止リストバンド
今までコレを持ってないからと言って静電気で部品を飛ばしたことがないけれど、1つはあってもいいかなと思ったのとなんか「持ってる」って言いたいがために購入w
来年もロボットの年になりそうw
ついでに、明日はコミケ3日目、終わったら速攻実家に帰省。大変な年末です。
最近、ロボットやらプログラムの開発に使っていたノートの調子が悪い。
起動時の音まで割れるようになってなんか動作が重い。
メモリを変えてからなので、メモリ周りで不具合が出ているのだろうか・・・。
それともウィルス!?
とりあえず、思い切ってリカバリをかけてみた。
DtoDなんで、リカバリ自体は早かった。
ただ、4年前の機種なんでWindowsXP SP1だったりで、
・SP1のHotFixをインストール後再起動
・SP2をインストール後再起動
・SP2のHotFixをインストール後再起動
ここから、ロボットに使うソフト「HEW」やら「GCC」入れて、VisualStudio2005入れて・・・。
なんだかんだで、OSの再インストールってOS以外の部分でいろいろ大変だよねー。
そうそう、ベステクのHPを覗いてみたらすごく気になる本が掲載されていた。
C言語による SH-2マイコンプログラミング入門
横山 直隆
技術評論社 2007-12-15
売り上げランキング : 33231
Amazonで詳しく見る by G-Tools
これの前のシリーズのH8の本にはすごくお世話になった。
もくじをみるかぎり、前の本をそっくりそのままSH2に載せ変えたようで、これはかなり期待できますね。
7144もベステクのGCCにターゲットが掲載されていたので、AX-12のプログラムもHEWからGCCに乗り換えてもいいかなとか思う。
シリアル通信周りも自前で書くよりベステクの用意してくれている関数に準拠する方があとあとATmegaとかに移植するのも簡単なのはわかってるんですがねぇ。
まぁ、暇があればやってみよう。
(とはいえ、GCC用のAX・DXのライブラリはベステクで公開してるんでそっち使ったほうが効率的なんでしょうけどねww)
そうそう、暇があればということで、さらにもうひとつ・・・。
卒業研究でもロボットやってるんですが、前にも言ったとおりWindowsでmegaroboticsのAIMOTORをWindows上からシリアルで制御してます。
なんか、最近WindowsのMFCにどっぷりハマってしまって、研究の内容以上にモーションエディターの作りこみにのめり込んでしまってます。
リアルタイムでダイレクトティーチングやってみたり、サーボ1つずつ送信と受信と設定してみたり、面白いんでいろいろつけて、実装することを楽しんでますw
(インターフェースの感じとしてはUE村さんのHSPで作った30軸エディタにも似てるような・・・。)
で、本題に戻って・・・。
卒論書いた後、制御対象がAIMOTORなんで、以後ロボット製作に使い回しが効かないんですよね。
せっかくなんで、そのままKOKUTENやG-ROBOTSにも応用できないかなぁと思うところ。
ってことで、時間を見つけたら、参考にしてるAIMOTORのC++ライブラリを参考にしてDynamixel用やフタバサーボのC++のライブラリを作ろうと思います。
もし・・・うまく行ったら公開してみようかなとか。
将来的には、ロボットにマイコンを乗せずにZigBeeかなんかでモーターつないで直接制御できたら面白いかなぁ。スタンドアローンで動くロボットじゃなくて、タチコマみたいにセンターで集中管理出来るほうがパソコンのリソースをフルに使えていろいろ出来る気がします。
でも、問題として・・・
そんなロボット作ったとして、ROBO-ONEには出られないんだよなぁ・・・。
そうなるとのむむさんみたいにC7に手を出すことに!?(笑)
まぁ、とはいえ、この話はこの前から想像ばっかりでなかなか先に進んでないんで、とりあえずライブラリ作るところからコツコツやるしかないですね。
とまぁ、頭の中ではいろいろ想像してますが、とりあえず、今は卒業研究がんばってますノ(近況)
どうも。みっちーです。
インフルエンザ完治しました。
今週から復帰してます。
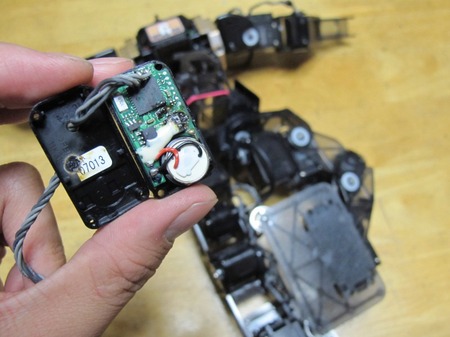
唐突な上に今更なんですがデュアルショック2をバラしてみました。
(ゲームをしていたらL2ボタンが押し込んで戻らなくなったため)


デュアルショックと違って基盤が2枚になってました。
特徴としては、特に2枚目の写真が分かりやすいんですが、ボタンからの信号が2枚の基板を繋ぐフラットケーブルで受け渡されているんですが、その部分の基板上のピッチがすごく大きい!!
ロボットのコントローラー用にデュアルショックからパラレルでボタンの信号を取り出したときはとても大変な思いをした記憶があるんですが、パラレルで信号を取り出すならこっちのほうが楽そうだなと思いました。
言いたかったのはそれだけです(笑
ちなみにボタンの押し込みは直りました。
中がベタベタになってたんで、たぶんジュースでもこぼしたのが中に入ったんでしょうね。
二足歩行ロボットが今の生活に溶け込めるのはいつの話だろう…。
ASIMOはいつ一家に一台の時代が来るのだろう。
・・・さて、
最近、個人コンテンツの面白さにハマっています。
具体的にいうとニコニコ動画とLivetubeです。
ニコニコ動画は最近有名なので、語るまでもないと思います。
Livetubeは個人のデスクトップのリアルタイムライブ配信サービスです。
配信者が音声とデスクトップ画面を配信して、絵を描きながらチャットを読み上げたり。
ちょっとした、ラジオ番組の感覚で参加したりします。
とはいえ、Livetubeはまだまだコンテンツも少ないんで、実際はたまにしか見てませんけどね。
最近、ロボットの大会に出ても「勝つ」ことにそんなに拘らなくなってしまっています。
前から言ってますが、「楽しいロボットとは」ばっかり考えてます。
(KO-Linkの開発が進まない言い訳!?汗)
それで、最近、KUMACOの動画を撮ってYoutubeやらmixiにUPするんですが、それでコメントを貰うことの方がモチベーションに繋がっているように思うことがあります。
まだニコニコ動画にUPしたことはないけれど、いつか面白い動画作ってみるのもありだなぁと考えています。
そういえば、見るロボットといえばロボフォースの活動は盛んですよね。
ロボットを買って参加することは出来なくても視聴という形で参加できたら面白いですし、そういう層が増えることで裾の尾が広がりますよね。
三月兎さんのところのロボットファンの動画配布のように面白いロボットのコンテンツを拾ってきてデータベースにしているのも面白いなぁと思います。
そしたら僕が出来るのは優勝するロボットではなく、それを用いたコンテンツを生み出すことかなと思ったり。
最近、大学の卒業研究でロボットやってるんで、家に帰るとロボット触る気力がなくて思考に時間を費やして時間ばかり進んでいく。
ふと思い立ってKUMACO動かして動画撮ったら朝が来てたりw
なんだろうなーww
話は戻りますが、やっぱり二足歩行ロボットが人間の手伝いを出来るのは相当先だと思います。
インフラを必要とするロボットは現場では使えません。
インフラを整備するならやはりそれはそれで時間がかかるでしょう。
やっぱりエンターテイメントで層を広げるのがいいんじゃないかな。
バンダイからガンダムの外装とかジャンジャンでるといいな。
ぬいぐるみロボットもうまく開拓できないもんかねぇ。
ロボットのパソコン化を行ううえで重要なポイントとして考えていた実時間OS。
国産の実時間OSとして、ムービングアイのART-Linuxがある。
カーネルが2.4なので、そのうち2.6が出るだろうと思っていたのですが・・・。
C7買ったら入れようと思っていたのですが・・・。
昨日、研究室で先輩に言われて気が付いた。
「最近、ムービングアイが連絡取れなくなってるらしいよー」と。
たしかにホームページが繋がらない・・・。
http://www.movingeye.co.jp/
どうなっちゃったんでしょうか・・・。
そういえば、チョロメテの開発にもムービングアイ入ってたよなぁ・・・。
ロボットをWindowsからTCP/IPで制御しようと思った。
唐突にw
それで、WinSock2でプログラムを書いてみた。
インクルードして、サンプル通りにやったらすぐ出来た。
やっぱり、パソコンのリソースはすごい、COMポートの制御もすぐ出来たし、TCP/IPも・・・。
小さなパソコンをロボットに載せたい想いがどんどん強くなってきてるww
とりあえず、参考にしたサイトを下に・・・。
winsockプログラミング
http://www.geekpage.jp/programming/winsock/
WinSock関数一覧
http://www.golgo.jp/winsock.html
WinSock2 プログラミング(サンプルソースいっぱい)
http://winsock2.org/
RS301CRのCADデータが欲しかった件ですが、UE村さんのアドバイス通り、FUTABAさんに問い合わせたところデータ送ってくださいました!!
これで、KUMACOの設計して行こうと思います。
UE村さんありがとうございます。
FUTABAさんありがとうございます。
みなさんもFUTABAのサーボで設計する際はメーカーに問い合わせてみましょう!
困った・・・。
ロボファイトの締め切りが近いというのに、出せるロボットがない・・・。
KUMACOも新機能はいろいろ考えてるんだけど、実行に移せてない。
平行リンクのロボは上半身がまだ決まらない。
HPI様からいただいたG-ROBOTSは、遊びつくしたので、そろそろ改造しようと思ったらHPIからアルミブラケットの発表。もうちょっと待とうかな〜とかw
当初の予定通りG-ROBOTSはKUMACO2.0の基軸に考えてます。
とりあえず、ロボファイトはROBO-ONEの参加権もあるので、バトル用に作っている平行リンクロボの方を頑張って形にさせたいトコです。せっかくZigBeeも買ったしねb
最近3DCADをガンガン使うようになってから思うのだが、各社いろいろサーボを販売してますが、CADのデータをHP上で公開してるのはROBOTS社だけなんじゃないかと・・・。
無料じゃなくて有料でもいいんで、サーボのCADデータが欲しいです!!
(あ、でも高いのは困りますww)
メーカーさんお願いしますm(_ _)m
特にRS301CRのデータが欲しい。
この前、AI MOTORをノギスで測ってデータ作ったけど、正直、もうめんどくさい・・・orz
誰か、作ってませんか?(人頼みw
とりあえず、キャプチャーも出来る用になった。
手前のモーターの角度を取得して、奥のモーターに指示する。
前に、Hitecのサーボでやったのと同じようなもの。
前と何が違うかと言うとやはりWindows上で処理していること。
マルチスレッドでプログラム書けるのはいいね。
タイマでスレッド回してたらいいので、制御に処理の負荷とタイミングを考えなくていい。
まぁ、CPUパワーをガッツリ使えるんで、処理に負荷そのものを感じないけれど・・・。
(というか、まだそんな処理してないけどw)
なんか、スレッドでプログラムを書いてるとマイコンが微妙になってきた。
平行リンクのロボもZigBeeで、パソコンとマイコンの通信を考えているんですが、処理をパソコンに丸投げしちゃおうかなと考え中。
研究でWindowsプログラムすることにならなければ、ゲームプログラムはパソコン、ロボットはマイコンと割り切って、ずっとマイコンでロボット作ってたかも。
パソコンのリソースの多さに改めて感激しました。
C7に移行したのむむさんがうらやましいなぁと思うこのごろ。
そろそろ、研究もロボットの形になって行くんで、研究のことをネタにするのもこの辺が潮時かな。
卒研の方に時間を割いててロボファイトのロボットの制作が間に合わない。
まだ、エントリーしてないんだけど・・・。
ああー、時間が欲しい。
というよりは、ずっと続くモチベーションが欲しい。
ロボットやりながらロボットは大変だなぁと。
いろんなことに興味の対象が移ったり・・・。
最近、ドージンワークってアニメを見て、同人への興味が復活したり・・・。
復活??ああ・・・、ん〜〜、ごにょごにょ。ww
もう販売されてすらいないAI MOTORのネタなんで誰の役に立つとも思えないが、VisualStudio2005からC++で制御してみました。
と言っても、メインのプログラムは「AI Motorの使い方」から引っ張って来ました。
ちょっと改造したらDynamixelにも使えそうだなーという感想。
VisualStudioからシリアルポートを制御するのは初めてだったんで勉強になりました。
ZigBeeで平行リンクロボを制御するのに使ってみようと思ってます。
その前に、上半身がまだ決まっていないのですが(汗
掃除をしてたのだが、ロボットの資産が今どうなっているのか現状が把握できていなかったのでまとめてみようと思った。
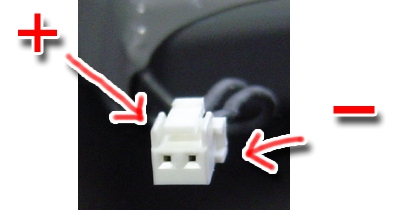
と、同時に、ファームとか全部アップデートしてみた。
CM-5のファームフェアを1.13から1.14へ
そのとき、今後リポに変えることも考えて両方とも黒のケーブルでつながっているCM-5の電源のピンアサインを調べておいたのでメモ。
今のDreamDriveのロボットのアクチュエーターの資産状況
KUMACO
・ HSR-8498HB(Hitech) * 13
SARUBO
・ S-3003(フタバ) * 8
平行リンクロボ
・ AX-12 * 16
未使用サーボ
・ HSR-8498HB(Hitech) * 6
・ KRS 2350ICS(KONDO) * 3
・ PDS-747fet(KONDO) * 1
・ TP-S3003(TAMIYA) * 1
・ DS R8801(JR) * 1
・ DS R3801(JR) * 1
・ RS301CR-H12(フタバ) * 1
死亡サーボ
・ AX-12 * 7
・ HSR-8498HB * 2
ここにG-ROBOTSが加わりました。
うーん。やっぱり小型サーボが多い。
あと、KOKUTEN用の基盤を作ったときに、汎用性と高めようといろいろサーボに手を出したときの影響でペアにならないサーボの多いこと。
ハリボテロボが作れそう。
死亡サーボもたまっていくけど、どうしよう。
前は修理してもらえたんだけどなぁ。
それと、頂いたサーボが意外と多い。
これは本当にありがたいと思う。

ALINCO DM-330MV
決してアリンコではなく、アルインコですw
中川さんに「コレなしでロボットのモーションは作れんよ〜」と言われて、ずっと欲しかった安定化電源。
パソコン用のATX電源を改造して使用していましたが、とうとうDM-330MV、ゲットしました!!
これで、バリバリと開発できます。
では、ここから宣伝!!
来週末、岡山リサーチパークで「おもしろ体験でぇー」が行われます。
二足歩行の展示は4団体くらいあるのですが、その中のひとつでKUMACOのデモをしています。
他にFREEDOMや、ロボビーMS、未完成のロボザックなんか置いてます。
テーマとしては「小学生の夏休みの宿題のお手伝い」という感じなので、技術的にはゆるーい感じですが他の展示も面白いと思うので、岡山近辺にお住まいの方で科学に興味のある方はぜひいらしてください。
たこやきとかの屋台も出てるらしいですし、お祭りって感じで楽しめますよ!

ほぼ2ヶ月遅れで、待ちに待ったサーボが届きました。
とはいえ、注文をしていたことを完全に忘れていたばっかりに、一昨日突然ロボットファクトリーさんから「発送しました」とのメール。
昨日の朝は郵便局の人に起こされました。
その時はお金も用意できてなくて、郵便局に再び取りに行ったのですが……それにしても突然。
財政状況的にも厳しいなぁ;;
最近忙しいので本気でこのサーボをいじるのは少し先になりそう。
とりあえず、マイコンで少しだけ回してみようと思ったのだが・・・。データシートどこにあるんだろう。
同梱のマニュアルにはそのへん何も書いてない。
RS485のドライブICは用意してあるのだが、パケットが分からんと回せんなぁ・・・。
研究室に配属されて、この言葉の意味を思い知らされた。
「二足歩行やるぞ」って思いながら、研究室に飛び込んだものの、仲良くなった院生の先輩とロボットについて、いろいろ話をして、自分の知らないことが、こんなにもあるのか、と。本当に思い知らされた。
そもそも、2足歩行ロボットをROBO−ONEの範囲内でしか、見れていなかった。
というのも、「morph3」の存在を知らなかったコト。
http://www.symbio.jst.go.jp/~morph/
院の先輩が、morphの産みの親の古田さんと話をしたことがあるとのことで、いろいろ教えてくれました。
こんなにすごいロボットがすでに居て、それを知らずに、小型二足歩行ロボを語っていたこと。
「逆運動学」が解けて喜んでいたけど、ロボット製作において逆運動学の計算は過程にしか過ぎないこと。
研究室ではZMPの制御をやろうと思っていたのですが、既に確立された技術であること。
学部の卒論なら、後追いでも卒論は書けるらしいんですが、そんなことは関係なく「井の中の蛙」だったなぁとつくづく感じました。
かと言って、未だに「大海を知らず」
今は「知りたい」の気持ちでいっぱいです。

5月号にはV850マイコンが付録で着いてきます。
USBで接続出来るのが魅力的ですね!
去年の6月号のSHマイコンほど本気モードではないので、控えめですが2冊ほど買いました。
(控えめといいつつ1冊ではないですw)
V850マイコンっていうのが、初めてなんで、スペック等まだ未知数なんですが、これは前に作ったニキシー管にでも使おうかなって思ってます。
ただ、触ってみていい感じだったらKUMACOのインターフェースにするのもいいですね。
「人の役に立つ」ためにマルチメデイアとの連携を考えているんでUSBは扱えると便利かもしれません。
とりあえず、まずはLEDを光らせるところから・・・なんですが、触る時間が取れるだろうか・・・。

卓上ボール盤を探していたんですが、ちょうどいいサイズがなかったんで、ドリルと垂直ドリルスタンドをいうものを見つけて合体して、ボール盤もどきにしました。
チャックではなく、手で閉めるタイプなんで、数回ドリル刃が抜けました。あと、結構精度は悪いみたいです。ちょっと残念。
しかしまぁ、その辺もちゃんと押さえながらすれば、どうにかなるのですが・・・。
一番の問題は「音」。
学生の賃貸アパートでこれはやっちゃいかんと思いました。
思いつつも、昼間にベランダでダッシュで使っちゃいました(ヲイ
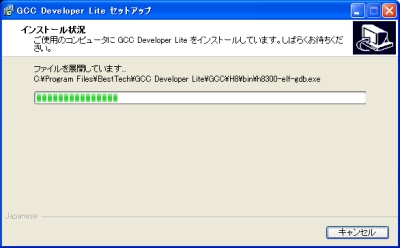
ベステクでGDLがバージョンアップされて、そんなに気に留めてなかったんですが、よくみたら「7144」の文字があるじゃないですか!!
ルネサンスの統合開発環境も捨てがたいんですが、H8とATmega128で、ずっとGDL使ってた分、インターフェイス6月号の付録基盤までGDLで使えるとなると、これはもう使うっきゃないって、ことで早速インストールしてみました!
ルネサンスの統合環境もオプションが豊富でほんとに捨てがたいんですがねぇ。
あ、ちなみに転送ツールとバイナリの拡張子はどうなってるんだろう。
手始めにKOKUTENのシステムを移植してみようかと!
ベステク万歳!!!(≧∇≦)ノ(≧∇≦)ノ
また、コンパイル終わったら追記します。
正直、今回のROBO-ONEの審査の「縄跳び」についてはあきらめてたんだけど・・・。
反則的な秘策を思いついた。
内容は秘密。
とりあえず、特殊な縄を作る必要がある。
ヒントは「リレー」。これでピンとくる人もいるよね。
ぶっちゃけ答えみたいなものなんだけどw
材料の調達が大変です。
「人の役に立つこと」は、画像処理で何かやろうとかいろいろ考えてたんだけど、そんな余裕はなさそう。
赤外線でもつけてTVリモコン機能とか、メイのパクリも考えてたんだけど、そんな余裕もなさそう。
とりあえず、明後日から旅行に行ってきます。
旅行中にいろいろ考えようと思います。
とはいえ、リゾートなんですがwww
まぁ、ノーパソ持って行くんでボチボチネタ集めしようかと。


ATXの改造電源完成しました!!
Ctake23氏に穴空けてもらいました。
結局、メインのパソコン用の電源を新調して、今まで使っていた爆音電源(ホントに煩い)をベースにしました。新調した電源は静音ですが、特価で2980円でしたww
というわけで、改造のベースにした電源はマックスポイント コンピューターから発売されているEG365P-VEです。
スペックとしては・・・。
足のXYZ実験機に使う予定。
今まで、安定化電源使ってこなかったんで、モーション作るにもいちいちリポ充電してたんですが、33Aも出力できるならそれも必要なくなりました!
とりあえず、完成してホッとしてます。
あと、ハンダごてが小学校から使っててボロボロだったんで新調しました。
かなり先の細いヤツです。そして、ロボザックまた2冊ほどゲットしました。

みすみロボット研究所さんの記事を見て、安定化電源がATXで作れるならこれはいいんじゃないの!
と思って、作ってたんです。
20pinをそのまま使えば、中を開ける必要もなかったんですが・・・。
欲が出て、小型化したくなって電源の中に、スイッチとかコネクタを仕込みたくなったんです。
ただ、実験してるうちに電源切り忘れて・・・
バチッ!!(ビリリ!)
無精はするもんじゃないですね。
コンセント刺しっぱで、延長コードのスイッチでON・OFF切り替えてたんですが、不注意でした。
合計2台潰してしまいましたとさ(ォィォィ
まぁ、1台はジャンクで買ったときから挙動がおかしかったんですが・・・。
しかし、痛かった〜〜。
本気で感電したの始めてかも。
また、代わりのATX探して来なければ!
今度は、ケース空けるのやめようかな。
作業日誌(みすみロボット研究所) - ロボット実験用電源をATX電源で作る
先日、ロボット学会で聞いてきた山海教授のHALが昨夜の情熱大陸で特集されていた。
学会での発表と重複する部分もあったが、やはりロボットにとって「役に立つ」というキーワードは重要であると感じた。
少なくとも、このまま趣味で二足歩行を続ける限りは「役に立つ」ロボットを作っているとは言えないだろう。「ここまでできるんだ!」「どうだ!」なんて自己満足してる今の自分を考えるととても小さく感じました。
昨日の放送でも、人工知能には限界があり、その部分を人間に置き換えた”サイボーグ”こそ、時代が求めるニーズだ。そして実際に「小児麻痺で動かなくなった片足が40年ぶりに動いた」という話は、純粋に「すごい」と思えた。
山海先生の「活動を支える原動力は、9歳のときに志したロボット博士になるという夢だ。」という言葉に対して、自分は「幼稚園のときからものづくりを見つめ続けてきたぞ!」なんて、思ったりもするのだが、それはまた別の話w
たとえ、どんな小さなコミュニティーだろうが、「誰かのため」になる、そういう「ものづくり」がしたいと最近つくづく思う。
大学も卒業が見え始め、「ほんとに自分が進むべき道」を真剣に考えてる今、こういう先駆者たちの一言一言が大きく心を揺さぶります。
「実家で親父の手伝いをしたい」、その裏腹で、「研究者になりたい」そう思い続けてきた自分の夢もあり、なんとか「夢を追い続けながら親父の手伝いをする」、両立する道はないのか、その共通点を必死で探している現在のHM。
とにかく、どちらにせよ「人が好き」であり、「人の役にたてる」という「志」は、しっかりと自分の中に持たねばならんと、そう思いました。
まぁ、戦利品という書き方もどうかと思いますがいろいろ日本橋で買い物をしてきました。
ちなみにロボゴング終わったあとは、心斎橋の2300円のカプセルホテルに泊まったんですが、着いた瞬間寝てました。

とりあえず、ロボットの買い物はサークルのHPの方で紹介するとして、個人的な買い物を・・・。
・LCX07
これは、Vinを出力するバッファで、とりあえずVinは3.3Vを想定。
I/Oのinは5Vに絶えられるんで、5V入力の3.3Vの変換に使う予定。
・SOPピッチ変換基板
これは、LCX07が1.27ピッチなので、DIPとして使用するために買いました。
・74HC07
これは標準の74シリーズのバッファですね。ただし、こいつも3.3Vはロジック的に1になるので、3.3Vから5Vに変換するバッファとして使用しようと思う。
・三端子レギュレータ48033F
これは、3.3V、1A出力の三端子レギュレータ(小さいです。)
なにをするかというと、そろそろインターフェイス付録のSH2基板に手を出そうかと・・・。
でも、サイズ的にはH8とそんなに変わらないんで、ロボットに搭載するかというとちょっと微妙。
とりあえず、サークルで買った ATmega128へH8のプログラムの移植が先なんでしばらくは触れそうにない。
今は部品が揃って満足ですwww
サイトを一新すると同時に、ロボットコンテンツとギャラリーも一新しました。
TOP、プロフィール、リンクが完成していませんので、一時的にトップがブログになっていますが、これはHMの見切り発車好きのせいですね。
ロボットコンテンツも説明がまだ書けていませんがとりあえずDynamixel AX-12もソースだけは先に公開しました。
配線関係の説明がないので、分かりにくいと思いますが、ある程度勉強していれば、ソースだけでもコメントをたどれば読めるようにしています。
なるべく早く説明を書いていこうと思います。
今朝、(てかさっき)、NHKのロボコン見てすごい感動した。
去年、書類落ちしたNHKロボコンなんだけど、その決勝戦の番組でした。
なんか、ホントにアイディア対決だなと思った。
うちの大学から出した書類が落ちるのもしかたないと思った。
さて、本題はNHKではなくて、ROBO−ONEなんだが、ロボコンのアイディア対決を見てると、アイディアと言う点でROBO−ONEロボットにもう一ひねり欲しくなる。
というのも、ROBO−ONEに型のようなものを感じるから。
とりあえず、「ジャイロを付ければ転ばない」「加速度センサで転倒判定」など、各種センサも揃ってますが、なんというか「組み合わせ」でしかない。
こんなこと言ったら怒られるんじゃないかと思いつつ、そう思ってる人もいるんじゃないかと思う。
NHKの東京農工大のロボを見てて、風を起こすマシンとか凄いと思った。
ああいう、突拍子もないアイディアがROBOーONEでも見たい。
「顔の認識が出来る」とか、ヒューマノイドロボだと確かに必要な技術なのかもしれないが、企業のパフォーマンスであって、「勝つためのアイディア」ではないと思う。
去年のROBO−ONEで、空飛ぶロボットが規格審査落ちになった事があった。
確か、回転物がどうとか・・・。あれは、非常に残念だったと思う。
韓国のマイロが少しずつ小さくなってるのも残念に思う。
最近流行(?)の変形は、アニメロボっぽくて確かにいい。
サーボのパワーも上がったし、そろそろジャンプ技とか、そろそろ出てくるのかな?
でもそんな人間的なヤツじゃなくて。
ロボットでしか出来ない突拍子もない攻撃。人間には不可能な技。
型にはまらないロボットだけのすごい技。
そいつを考えたいと思う。(ある意味悪役ロボ!?)
(保護機構を付けてもDCモーター使っちゃまずいのかなぁ?)

Robovie-MSを動かす件だが、ダンスをさせることになった。
特に見てくれは気にしないらしいので、少々大きいが普段使っている自作の基板を載せてみた。
最近、Dynamixel AX-12について考えることが多かったんで、PWMサーボだとなんか安心しますww
もともとRobovie-MSに付属の基板は?
って話なのだが、どうもマウスを使ってスライダーで制御って言うのはやりにくい・・・。
この辺は慣れなんでしょうね。
ちなみにこの自作基板については、ロボットのコンテンツで少しずつ紹介しようかと思います。
宮田さんのLBCに比べたら、いろいろな点で劣るかと思いますが、何かの参考になればと思います。
とりあえず、二足歩行というかH8入門ってスタンスで書いていこうと思います。
さて、サークルでは世代交代を意識し始めました。
大学1年で結成したロボットサークルなんですが、僕も3年になり、来年は研究室配属もある、同期は就職活動も始まるしってことで、部長の椅子も来年には後輩に譲らないといけない、今年一年で後輩にいろいろ教えていこうと思います。
後輩にはその辺まだ、あんまり詳しいところを説明はしてないんですが・・・。
まぁ、個人的には卒業しようが、大学院に行こうがロボットは続けるつもりなんですが。
自分自身、高校時代もいろいろな活動をしましたが、この「引継ぎ」ってのが、本当に大切なんですよね。
で、後輩にサーボも渡そうってことで、使えるサーボと使えないサーボの選別をしました。
そしたら出てくる出てくる壊れたサーボ。
モーターが逝ったり、FETが逝ったり・・・。
コレはもったいないからニコイチ用のパーツかなぁ・・・。

そういえば、サークルのHPへのリンクがどこにもなかった。
岡山県立大学ロボット研究サークルメヒャニカ
http://mechaniker.s93.xrea.com/

昨日注文した本が届きました。
翌日に届くなんてamazonさすがですね!
そして、図書館で見つけた本たち。
どれもROBO-ONEでは有名な本。
頑張って読破したいと思う。
とりあえず、目を作るのは、読み終わってから・・・w
「゚д゚ミ よし、がんばろう

近所のGEOで480円にてゲームボーイのポケットカメラを購入。
中学校のころ、ゲームボーイで「デジカメ」が撮れるなんて、すんげぇ欲しかったけど、買ってもらえなかったことを思い出します。
今回、決してカメラに使うわけではなく、これで、画像処理してみようかと思います。
そこで、今日amazonで注文してみました。
「吉野のロボット」さんの製作日誌。
吉野のロボット製作日誌―手作りロボットの「構想」「設計」から「製作」「実験」まで! 吉野 耕司
工学社 2006-03
売り上げランキング : 35699
Amazonで詳しく見る by G-Tools
ネットで読むのもいいんですが、オフラインでちゃんと読めるのが欲しかったもので・・・。
早ければ、明日には届くと思います。
吉野さんがH8/3048でやっているようなので、普段3052でロボットやってて、使い慣れているという点からも吉野さんの資料を使うことにしたのは、即決でした。
今回、サークルで製作するマシン。
AX-12もそれなりに使えることが分かり、制御の方もしっかり頑張りたいと思う。
なんたって、ベステクのセンサーは使いほう(ry

とある筋からの依頼で、Robovie-MSを動かすこととなった。
ちょっと楽しみである。
ちなみに渡された、ソフトウェアが、Rottenmeyerだった。
第9回のROBO-ONEの会場でも販売されていたので、知っている人は多いと思う。
実はこのソフトの開発者が高校時代の先輩だったりして、第9回のときに再会したときは、本当に驚いた。
そのソフトを今回使うこととなって、ほんと偶然って面白いと思うw
ネタって言えばネタなんですが・・・。
授業中に妄想しながらペンを走らせてニヤニヤしてたのは僕です。
すみませんww
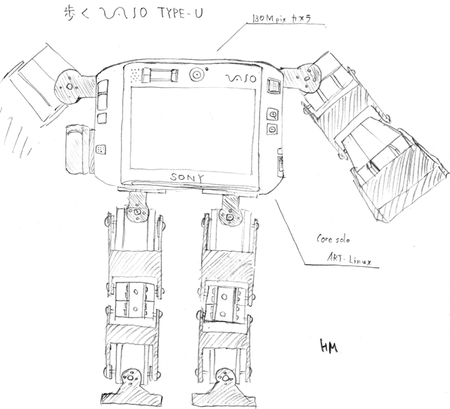
ROBO-ONEやってる人でパソコンの持ち歩きが大変だから「VAIO type U良いよね」って話を時々見かけるんですが。。。
520gと言えばもう、持ち歩くんじゃなくて搭載するべきなんじゃないでしょうか!!!
↓ こいつですね。

しかも、標準でカメラついてますし・・・。
ART-linux搭載して動きまくり・・・。
障害物避けながらダッシュしたり・・・。
6月にはHDDではなく、32GBのメモリー積んだバージョンも発売されるようで、そうしたらたぶん500g切るんじゃないでしょうか?
とにかく、ロボットにパソコン1台、個人で搭載しちゃうのも夢じゃないでしょうね。
で、速攻作ったこの画像。
そして
これはネタw→ ■
歩くパソコンと言えばねw
サブマシンにVine Linuxを入れてみた。
ちょっといじくってみる。
そのうちART Linuxを導入して、I/Oカードでも刺してサーボモーターでも回してみようと思う。
いつか、背中に小型のノートパソコンを背負ってLinuxで動く二足歩行ロボを作ってみたいと思う・・・。
カメラなんかはUSBでじゃんじゃん増設出来るし、制御の計算速度気にしなくても良さそうだし、割り込みで充分サーボのPWM信号出しまくれるし・・・w
そんな小型パソコンと強力なサーボが欲しい・・・
SH2用の基盤を作るため、エッチングを行った。
とりあえずGW中はいじれそうにないので、穴あけ&フラックスまでやろうと思う。
とりあえず、今日はエッチングだけ。
なかなか上手くいったと思う。
・・・でもね。

エッチング液、靴とズボンにぶちまけてしまった;;
これ、衣類につくとマジで取れないから・・・。
プリント基板をエッチングで作るときはくれぐれも気をつけましょう。
NC工作機使えたら最高なんだけど・・・学校のNC、1mmと2mmのエンドミルしかないって・・・そりゃないわ;;
作業日誌(みすみロボット研究所)さんの記事を勝手に参考にして、自分も32軸やってみようと思ったのだが・・・。
配線が面倒;;
というわけで、ちょうど今日、この前から紹介しているH8/3052のプリント基板作る予定だったんで、慌ててSH用のパターンも作成してみた。
うーん。
やることは、ポートCとポートDを外に出してサーボ用の電源を取り回すだけ・・・。
やってみたのが記事トップの画像。
なんていうか、当然っちゃ当然なんだけど・・・。
微妙・・・。
てか、やってしまった;;;;
これ以上汎用ポートを外に出せないし、せっかくのADコンバーターを潰してしまっている。
配線めんどくさいっていったけど、ユニバーサル基盤使ったほうがましかもしれない。
とりあえず、基盤を横断して反対側に出すのは失敗だった。
たぶんJ3の方向に持っていったほうが良かった気がする。
とりあえず、昼から実験用にコレで基盤作ってみます。
んで、近いうちに直して行こう・・・。
とりあえず、眠たい・・・。
すっかり忘れてて1日出遅れてしまいました。
2件の本屋をはしごしてなんとか3冊手に入れました。
1冊は友人に頼まれてたものなので、それでも手元に2冊残ります。
なんで、馬鹿みたいに何冊も買ってるかって?
チッチッチッww
付録にSH2マイコンのSH2/7144がついてくるんだな〜。1480円って、コレは買うしかない!!ってね。
さて、このSH2/7144ですが、どの程度のスペックのものなのでしょう。
実は、秋月のSH2/7045が手元にあったりします。
9000円もしたのに、1500円の雑誌の付録に負けてる気がしてなりません。
実際7045が28MHz動作なのに比べ、今回の付録マイコンは48MHz動作らしい。
ピンヘッダの数だけは圧倒的に7045の方が上です。(いいのか悪いのか)
ちなみに7045は買ったもののほとんど使ってないです。
ベステクさんのヘッダファイルには「7045を買ったからと行って二足歩行ロボットが歩くと思っているのは見当はずれである」みたいなこと書いてるし・・・。ってわけで扱いやすいH8に流れて放置したまんま;;
ちなみにSH2/7045と言えば、フリーダムに搭載してるマイコンです。
さて、今回の付録ですが、読んでるとどんどん面白くなってきました。
ただ、序盤でアドレスバスとデータバスがポートC・ポートDと兼用みたいなんですが、序盤の書きだしだとアドレスバスとデータバスにしか使えないような印象を受けて一瞬フリーズしました。
「え・・・汎用ポート20個じゃサーボ足りんじゃん・・・しかもPE0〜4はいづこへ・・・」ってな感じに。
ちゃんと、ポートAから全部発見しました。
72ページは機能を1つ以外すべて省略してたみたいです。
あんまりスペックの話をしてないけど、コストパフォーマンスは最大値を取りそうです。
とりあえず、9000円のSHが1500円のSHに負けているということだけは理解できたようです。
悔しいので明日最寄りのデパートの本屋も見てみます。
周辺の本屋全て買い占めてしまおうかと思いました。
といっても、もうほとんど売り切れみたいですが。
そして、作業日誌(みすみロボット研究所)さんに注目中。
HMと交流のある人なら知っているだろう。HMのSONY信者っぷり。
携帯・ノーパソ・デジカメ・etc..
ここぞとばかりにSONYで固めるHMに入ってきたショックな出来事。
ソニー「QRIO」新規開発を中止 - ITmedia
SONYのロボット部門縮小の話は聞いていましたが、開発中止になるとは、いやはや。
当然、アシモ以上に「QRIO」に期待していたのになんだかショックです。
ロボットビルダーとしても、走って踊れるQRIOを目標に取り組んできました。
第8回のときの踊りはQRIOを意識してプログラミングしていました。
ヒューマノイドこそ日本のこれからの産業になるのではないかと期待している面もありました。ロボットを開発している企業のみなさんにはもっともっと頑張ってリードしていただきたいものです。
それこそ、ROBO-ONE界も盛り上がりにも繋がってきますって!
(充分盛り上がってる?ww)

なるものが発売されました。
http://www.rakuten.co.jp/tsukumo/487433/487434/487910/531069/#732474
特徴としては
ですね。
どんな値段やねん!と思ったら意外と16000円で、そんなに馬鹿げた値段でもありませんでした。(でも高い!)
どうやらバイオロイドだけでなく全体的にシリアル通信に切り替わっていくようですね。使いやすいプロトコルに期待します。
AX-12もシリアルが難しいとか言って逃げてる場合でないと痛感しますorz
今日は、急ブレーキで寿司がぶちまけたりちょっと凹んだ夕方だった。
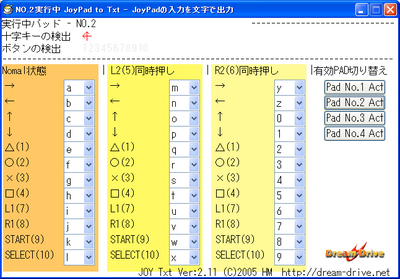
さて、JOYTxtの最新版ができましたので公開します。
http://dream-drive.net/robot/joytxt.html
今回は、同時押し対応で36通りのコマンドが実現できます。
次回のロボットではこれを利用するかもしれません。
といっても、ROBO-ONEです。
まずは、予選を通過しないことにはコントローラーに出番がないというのが辛いところですが・・・。
悲しいですね。
NHKロボットコンテストの書類審査落ちました。
せっかく完成したバイロイドも凹んでます。
次はレスコン目指します!
次は受からせてください!!レスコンの偉い人〜〜〜〜!

この間、NHKロボコンの応募用紙を書いたところですが、
今日はレスキューロボットコンテストの説明会に行ってきました。
でも、まだルールが完全に決まってない模様で、内容はもっぱら神戸市消防局の活動報告やレスキュー隊の紹介でした。
(もともとそういう啓発活動がメインらしいですが)
それで、そのレスキュー隊の使ってる油圧式の資機材。
これが、二足歩行ロボットの手になったらなーとか、なにやらROBO−ONEのことを考えていたという・・・。
出るかどうかはまだ微妙な感じです。

だいたい完成です!
え?どんだけ時間かかるんよ。って?
学祭とか他のロボットに時間裂いててバイオロイドしまってました。orz
サークルに持っていったら人気で、みんながつくっちゃいました。ヽ(´ー`)ノ
なんか寂しい感じもしますが、まぁ、完成ですな。
次回とりあえずベースはこいつで行こうと思います。
今までPWMサーボばっかりだったんで、マイコンの方はオリジナルでいけるかどうか・・・CM−5がGCC Developer Liteに対応してるんで、すくなくともCで書くとは思いますが・・・。
しかし、ティーチング機能すげーーー(;´∀`)

昨日サークルで作ったロボット用コントローラーなんですが、ステータス表示用のモニタを取り付けてみた。
そしたらなんか携帯ゲーム機っぽくなった。
よく考えたらBluetoothコントローラーでありながらモニターを搭載したことで、
「Bluetooth通信機能搭載 携帯型ゲーム機」としても動作可能なのです。
モニターが16文字の2段なのでそんなに複雑なことは出来ませんが、暇があればゲーム機としてのプログラミングをしてみようかと検討中。
まぁ、ゲームプログラムは某ESP氏に先を越されそうですが…。

ついに届きました!!!!
でも、1日注文が早かったため、ネジが錆びててマニュアルのない初期ロットでした〜〜〜orz
でも、ベステクさんの対応が早くてマニュアルだけは手に入ったので、遊んでみようと思う。
このバイオロイド、ツクモさんで買ったんだけど下の写真。
毎度のことながら、ツクモさんの梱包は激しすぎると思う。まぁ、安全でいいとは思うんだけど。
ちなみに3ヶ月分のバイト代が一気にふっとびましたとさ。(ニヤリ

今日岡山ドームへフリーマーケットに行ってきた。
いろいろあった1日だったが、フリマで手にいれたコレ。
「ロータリー ツール キット」
球体のヤスリやバイスがセットになった1品。
なんと1500円で手に入れてしまった。
軽くてヤスリがけには最適です。(バイスは期待してないw
これだからフリマはやめられない!w

やはりHSPの使いやすさにはかないませんね。
ロボットとハイパーターミナルをつないで、コマンド形式のロボットを作ったのですが、コマンドとユーザーインターフェイスとしてのジョイスティックの中継ソフトの開発にHSPを利用しました。
接続としては↓
『ロボット=無線機 〜 無線機=ハイパーターミナル=HSP=ジョイスティック』
という感じです。
もともとゲームを作っていた下積みのおかげでジョイスティックの導入がかなり簡単になったわけですが・・・。
ゆくゆくは、やはりVC++で同じものを組んでみたいものです。
前回JOYPOINTERを作ったときも同じことを言っていましたね。ハイ
ただ、最近C++用のel.hというライブラリを発見して、かなり簡単にC++で描画を自由に扱えることがわかり、今度HSPとの対応表でも作りながら、何か作ってみようかと思います。
この夏こそ・・・がんばろう。
サークルで足が完成しました。
これから歩かせるためのプログラムをがんばります。
まぁ、構造的に自重に耐えられそうにないですが…。
いろいろ改変しながら9月に向けて完成を目指します。
先日、テレビを見ていたらこのようなものを見つけた。
http://www.sakakibara-kikai.co.jp/products/other/LW.htm
すり足で二足歩行が出来るらしい。
すばらしい。

最近、ロボット研究サークルのほうでも4自由度のロボットアームを自由自在に動かせるようになった。
いよいよ二足歩行に取り掛かっていくわけだけですが・・・。
ロボットについて知れば知るほどロボットの能力ってすごいって思います。
人間が搭乗できるロボットが出てきて……戦争に使用されないことを切に願います。
ロボ研での話。
名前がまだないこいつですが、今日始めて動きました!!
今日が誕生日です!
H8/3052マイコン搭載です。
今は、ライントレース用の光センサしか積んでませんが、のちのちセンサ類をたくさん積もうと思ってます。
なぜが左右のトルク比がずれてて右旋回をし続けます。









![ROBOCON Magazine (ロボコンマガジン) 2012年 05月号 [雑誌]](http://images-jp.amazon.com/images/P/B007RFHKK4.09.MZZZZZZZ.jpg)



最近のコメント